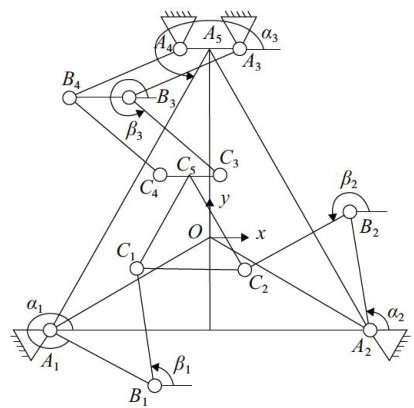
半对称平面2RRR一PaPa并联机器人机构运动学分析与参数优化

打开文本图片集
关键词:平面并联机构;运动学;工作空间;尺度综合;狼群算法中图分类号:TH122 文献标志码:A 文章编号:1671-5276(2025)05-0154-05
Abstract:A semi-symmetric planar 2RRR-PaPa parallel robot mechanism is proposed with planar parallel mechanism takenastheresearch object.A kinematicmathematical modelisestablished,andtheinversekinematicssolution expression of the mechanism is abtained through calculation.Simple line scan is applied to search for workspace points, the workspace is visualized and drawn using MATLAB,and by graphical methods,the influence trend of parameters is analyzed.The structural parameters scalesof the mechanism are synthesized using the wolf pack algorithm.The research analysis shows thatthere are voids inside institutional workspace,and the optimized workspace performance can achieve significant improvement.
Keywords: planar parallel mechanism; kinematics;workspaces; scale synthesis;wolf swarm algorithm
0 引言
并联机器人凭借其刚度强、速度快、精度高等优势备受青睐,在工业界被广泛地应用,已逐渐成为相关领域的主流机器人[。(剩余4736字)
