ROV电缆自动收放优化技术研究

打开文本图片集
中图分类号:TP391.4 文献标志码:B 文章编号:1671-5276(2025)03-0246-04
Research of Optimization Technology of ROV Cable Automatic Retraction
ZENGMing,SHAO Mingqi,WANG Xiangqian,LI Shuo(No.710R&D Institute,CSSC,Yichang 443003,China)
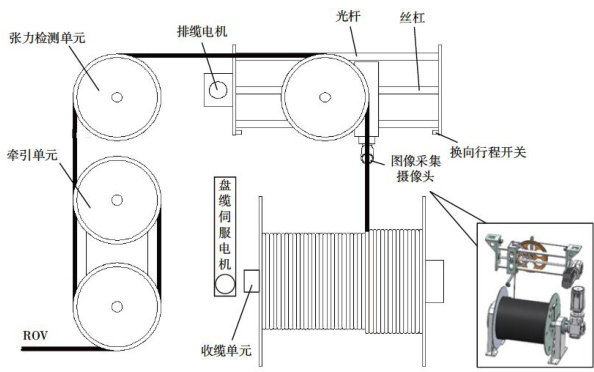
Abstract:InunderwaterROVoperation,theumbilicalcableisfrequentlyretractedandunwoundthroughwinch,andthe neatnessofisarangementonstorage traydirectlyafectstheservicelifeofthecable.Onthebasisof theanalysisonengineering application,amethdofoptimizing theautomaticretractionandunplacingarangementofcablesusing imagedetectionmethodis proposed,andverficationof themethodiscondcuted.Theresultsshowthattheuseofimagedetectiontechnologycaneffectively solvethe problem ofunevencableretractionandarangementby existing methods,andgreatlyimprovetheuniformityof cable retraction and arrangement.
Keywords:ROV;umbilicalcable;imagedetection
0 引言
水下遥控机器人(ROV)作为一种重要手段,在人类探索、研究、开发海洋资源的过程中承担着重要任务,目前已广泛运用于区域勘探、水下障碍物清除、定点搜救打捞作业等领域[1]。(剩余4915字)
