基于改进自抗扰光电稳定平台视轴控制

打开文本图片集
中图分类号:TP273 文献标志码:A 文章编号:1671-5276(2025)03-0242-04
Visual-axis-controlled Optoelectronic Stabilization Platform Based on Improved Active Disturbance Rejection
LI Qianwei,QIU Yafeng,LIU Kang,YAN Xiaohu,TIAN Haojie (School of Mchanical Engineering,Nanjing University of Science and Technology,Nanjing 21Oo94,China)
Abstract:Thestudyofofsoreoptoelectronicplatformrequrestherapidityandstabilityofopticaxis,butencountersomplexity bythe methodofauto-disturbancerejectionnonlinear.Taleviatethecomplexitylinearizationisproposed.Theknownpartof themodel informationisintroduced,thelinearizedactivedisturbancerejectandisoptimized,andanimprovedlinearactive disturbancerejectioncontrolerisdesigned.Through Simulink simulation,andincomparisonwiththesimplifiedlinearactive disturbancerejectioncontrol,itisfoundthattheresponsespeedofimprovedLADRCisincreasedby84.6%comparedwiththat of linear control,and the anti-interference ability is also improved with robustness.
Keywords:optoelectronic stabilization platform;active disturbance rejection;linear control;visual axis control
0 引言
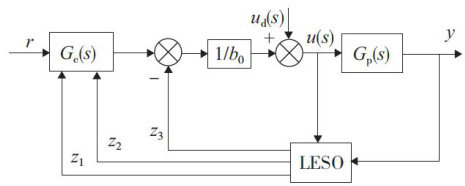
1自抗扰控制的策略
海上目标探测采用浮标作为载体,上方搭载光电稳定平台,用来对范围内的目标进行定位,进而获取目标图及相关位置参数。(剩余5116字)
