应用状态反馈云数据的变电站巡检机器人S型加减速控制方法

打开文本图片集
中图分类号:TP273 文献标志码:B 文章编号:1671-5276(2025)03-0201-05
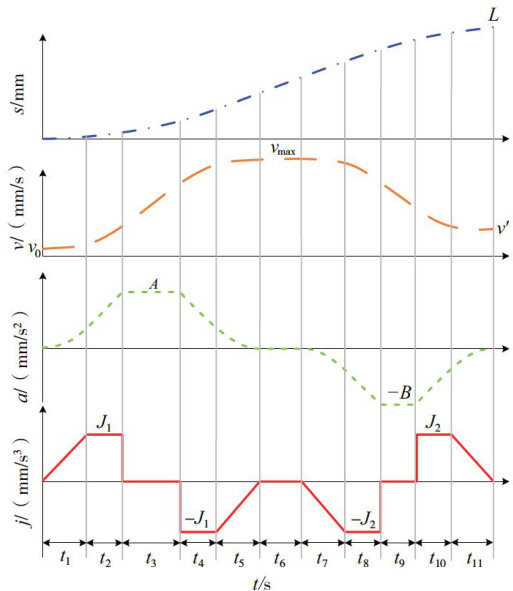
Abstract:Inroutieoperationofsubstationinspectionrobots,exponentialacelerationanddecelerationcontrolalgorithmsare usuallyused to generatecontrol schemes,andasuddendeceleration change mayoccuratthestarting point,causingadrastical accelerationchangerateinthespedcontrolresult.AS-typeacelerationanddecelerationcontrolmethodforsubstation inspectionrobotsusingstatefedbackclouddataisproposed.Using theS-typecontrolprinciple,theaccelerationand decelerationcontrol processoftherobotisdividedinto11stages,andacompleteS-typeacelerationanddecelerationcontrol model isconstructed.Assistedbycloudcomputing platforms andsensordevices,astate feedback clouddatacolection moduleis builtotrackthereal-timeoperationstatusofrobots.Acontrolercomposedoffeedforwardcompensationandfeedback compensationisdesigned,andacontrolparametervalueschememeeting therequirementsisdetermined.Particle swarm optimizationalgorithmisapliedtooptimizethesolution,generatingtheoptimalcontrolparametersfortheS-typeacceleration anddecelerationoftheinspectionrobot.Theexperimentalresultsshowthattheaccelerationchangeratebytheproposedmethod is less than 0.2m/s3 ,which meets the smoothness requirements of robot's acceleration and deceleration changes.
Keywords:state fedback;inspection robots;acceleration and deceleration; S- shapedvelocity curve;compensating control
0 引言
变电站运行的安全性和稳定性对于整个电力系统的正常运作至关重要。(剩余5400字)
