基于改进ORB_SLAM3的奶牛喂奶机器人建图算法研究

打开文本图片集
中图分类号:S821.4 文献标识码:A 文章编号:2095-5553(2026)03-0134-08
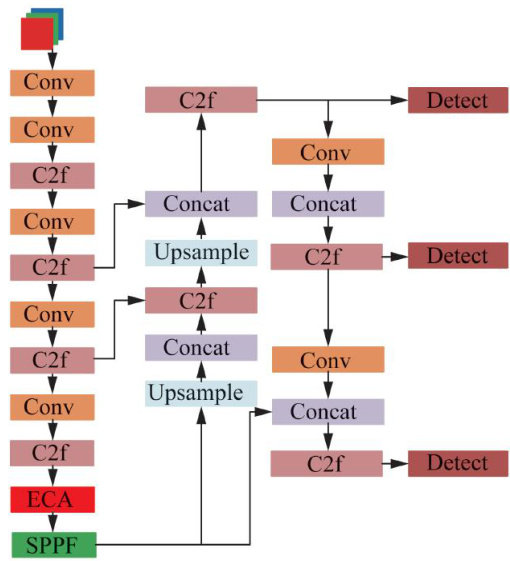
Abstract:Withthedevelopmentthelivestock industrytowardsstardizationautomation,inteligent milkingrobots haveemerged,aiming toincreasefeeding eficiency,reducerelianceonmanuallabor,improveeconomic outcomes.Thisstudy presentsthe design aninteligentmilking robot navigationsystem,combining SLAM algorithmobject detection.Initially,a hybrid filter using the ExtendedKalman Filter(EKF)forprediction pre-integration forcorrection was designed toimprove data fusionaccuracy stabity between the IMU camera. Additionally,an ECAatention mechanism was integrated into theYOLOv8s network,with the improved YOLOv8s incorporated into the ORB_SLAM3 system to enhance object detection,image segmentation, eliminatedynamic feature points.Through experimental comparisons on the TUMdataset,the improved algorithm demonstrates significant advantages in terms Absolute Trajectory Error ( ATE ) Relative PoseError(RPE), the RootMean Square Error(RMSE) in dynamic scenes was reduced with up to a 91.41% ,which effectively enhanced the accuracy stability the system.Lastly,the system was successully deployed ontheROS-based robotic platform,generatingahigh-precisiondensepoint cloud mapsfor navigationwithina simulatedranch environment. This studyers aneficient stablesolutionforlocalizationnavigationinintellgentmilking robots,with promising potential for further optimizations in real-time performance broader application scenarios in the future.
Keywords:cow;milking robot;dynamicfeature point elimination;ROS-based robot;hybrid filter;mapreconstruction
0 引言
随着国家大力支持和鼓励畜牧业向规模化、标准化以及智能化方向发展,越来越多的畜牧企业开始意识到智能化设备的潜力,特别是在提升饲养管理效率、减少人力依赖和提高经济效益方面的优势[1]。(剩余13512字)