田间除草机器人机械结构设计与分析

打开文本图片集
中图分类号: S224.1+5 ;TP242.6 文献标识码:A 文章编号:2095-5553(2025)07-0021-08
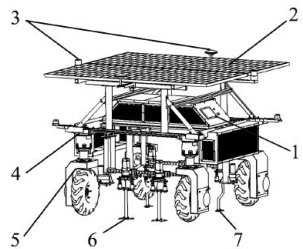
Abstract:Toaddress the limitations of traditional herbicide sprayingandoutdated micro-cultivator weeding equipment,a field weeding robot was developed.The robot consisted of a mobile chasis,weeding mechanism,power system, motion control system,navigationand path plannng system,andan image recognition system.First,the mobilechassis was designedusing theoretical calculations and3D parametric modeling.The structure featured an adjustablewheel baseand longitudinal height,andagantry-typefour-wheel independentdrivechasiswithsteer-by-wirecontrol.Next,the weeding mechanismwas developed based on motion trajectory analysis.It combined an S-shaped inter-row weding bladeanda crescent-shaped inter-plant weeding blade.Thissystemincludedanelectric push-rod lifting deviceanda lateral slidingadjustment mechanismforpreciseoperation.Finally,fieldexperiments wereconducted toevaluate the robot’s performance. The results showed that at a travel speed of 0.3m/s ,with the crescent blade rotating at 1.3r/s and operating at a depth of 3cm ,theseedling injury rate remained below 5% ,while the weed removal rate exceeded 95% ,the robot achieved a working efficiency of no less than 0.2hm2/h in fields with a transport slope of up to 15∘ and a planting slope of no more than 5∘ . This study provides a valuable reference for the field management of low-growing cash crops.
Keywords:field weedingrobot;movingchassis;independent steering;crescent shovel;S-shaped interlineknife; low planting
0 引言
我国田园杂草种类多、分布广。(剩余12019字)
