基于Backstepping的履带式无人车斜坡转向轨迹跟踪控制研究

打开文本图片集
中图分类号:S232.3 文献标识码:A 文章编号:2095-5553(2026)04-0155-08
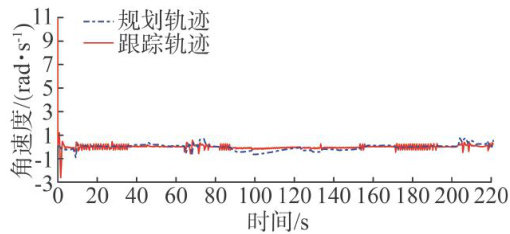
Abstract:Duetothecomplex interactionbetweenthetracksandtheterrain,itisextremelydificultforunmanned tracked vehicles(UTV)toachieve precise controlof their movement on mountainous slopes.UTV havea broadaplication prospect in agriculture,military,rescue andasistance and other fields.Basedonthis,research is carriedout onthe trajectorytracking controlof UTVtravelingonslopes,and thetrajectory tracking algorithmforUTVsteeringonslopes basedonthedynamic modelisdesigned tosolvetheproblem of precise driving of unmanned trackedvehicles on slopes. Firstly,thebasic theoryof nonlinear system control,Lyapunovstability theoryand Backstepping basicprincipleare analyzed,whichprovidesthetheoreticalbasisforthedesignof trajectorytrackingcontroler.Then,akinematicmodelof UTVfor slope traveling is established,and nonlinearconstraints for the trajectory tracking controler designare setup. Finally,basedon Terra mechanics principles,a dynamic model for slope steeringoftracked vehicles considering track slip andsliding is established,andan improvedPIDcontroleris designed basedonthedynamic modelof trackedvehicle slope steering andthe Backstepping theory,and the simulation verification is cariedout.The simulation results showthat the RMSE values of both thetrajectory planning valuesand tracking values arebelow O.2,whichproves thatthe designed
controllerhasachieveda good trackingeffect.
Keywords:unmanned tracked vehicle; slope-steering;trajectory tracking control;PID controler
0 引言
履带式无人车是适用于农田、丘陵、山地地区的无人机动平台,能够满足耕作、运输等需求,是未来智慧农业装备的发展热点[1.2]。(剩余10174字)