穴盘苗气力式整排顶苗机构设计与试验

打开文本图片集
中图分类号:S223.9 文献标识码:A 文章编号:2095-5553(2026)04-0058-07
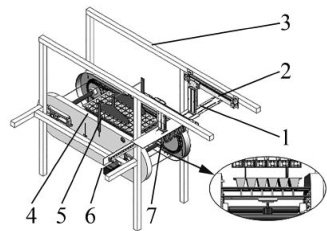
Abstract: Aiming at the problems of seedling ejection filure,easy deformation and breakage of the potting body during ejectionof the ejecting-clamping seedling extraction device,a pneumatic whole-row ejecting device was designed,which adopts pneumatic drivingoftheejectorrodtoinsertintothepotingbody,soastoejectthewholerowofpotingseedling, andtheworking principleof thedevicewasanalyzed.Through theestablishmentof potingbody kinematicmodel,the kinematicanalysisofthepoting sedlings afterejection was conducted,and itwas determined that thefactors afecting the efectof seedlingejection were the diameterof thetop bar,the depthofthetopintothe potingbodyand the ejection sped.In this paper,screw pepper seedlings in hole trays wereselectedas test objects,and Box—Behnkenresponse surfaceanalysis method wasused,and thesubstratedamageratewasusedas theevaluation index,a three-factor, three-levelorthogonaltest was designed.Through analysisof varianceand3Dresponse surface analysis,theoptimal parameter combinations were determined as the top rod diameter of 3.50mm ,depth of the top into the pot of 20.00mm , and the ejection speed of 75.00mm/s . After bench verification tests,the average substrate breakage rate was 4.16% :
Keywords:cell seedlings;transplanter; sedling jacking device; seedling picking mechanism; pneumatic
0 引言
一种显著趋势[1]。(剩余11217字)