基于强化学习的灾区应急无人机网络服务公平性最大化方案

打开文本图片集
关键词:无人机通信控制;公平性指数;深度强化学习;混合动作空间中图分类号:TP183 文献标志码:A 文章编号:1001-3695(2025)08-027-2452-08doi:10.19734/j.issn.1001-3695.2024.12.0498
Reinforcement learning-based approach for maximizing service fairness in emergency drone networks in disaster areas
LiHuaicheng,Peng Jian†,HuangWen,ShenQunli,Liao Sirui ( 61oo65,China)
Abstract:Existing methodsfor unmanned aerial vehicle (UAV)-based emergency communication services in disaster areas optimizenetwork performanceunderglobalenvironmental information.However,thesemethodssuferfromlownetworking eficiencyandunbalancedresourcealocation,which hinderthe maintenancestablecommunication services indynamicdisaster environments.As aresult,some users may not receivetimelyrescue.This paper addresed the problem maximizing UAV communication quality.The method modeled the problem as a POMDP and designed a deep reinforcement learning-based approach tooptimize UAV path planning andresource alocation.The methodused network throughput astheservicequalitymetricandJain’sfairnessindexasthebalancingcriterion.Itdevelopedareward functionmechanismbasedonobjectivedecoupling,and constructeda parameterized deep graph reinforcement learning network toachieve joint optimization UAV trajectoryplanningandresource allcation.Extensivecomparativeexperiments wereconductedunder16dferent simulationconditions.The proposed method significantlyoutperformed four baselinemethods,improving the fairness index by 9.6% and demonstrating effectiveness across multiple performance metrics.
Key words:UAV communication control;fairness index;deep reinforcement learning;hybrid action space
0 引言
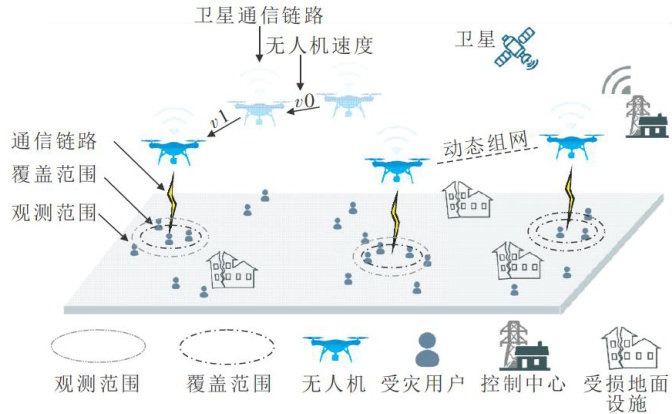
无人机通过搭载通信模块,作为空中基站为地面用户提供临时通信服务已经得到了广泛的应用,这对搭建灾区救援的应急网络是一项有前景的技术[1,2]。(剩余20325字)
