基于十字路口交通流场景的自动驾驶客车速度控制

打开文本图片集
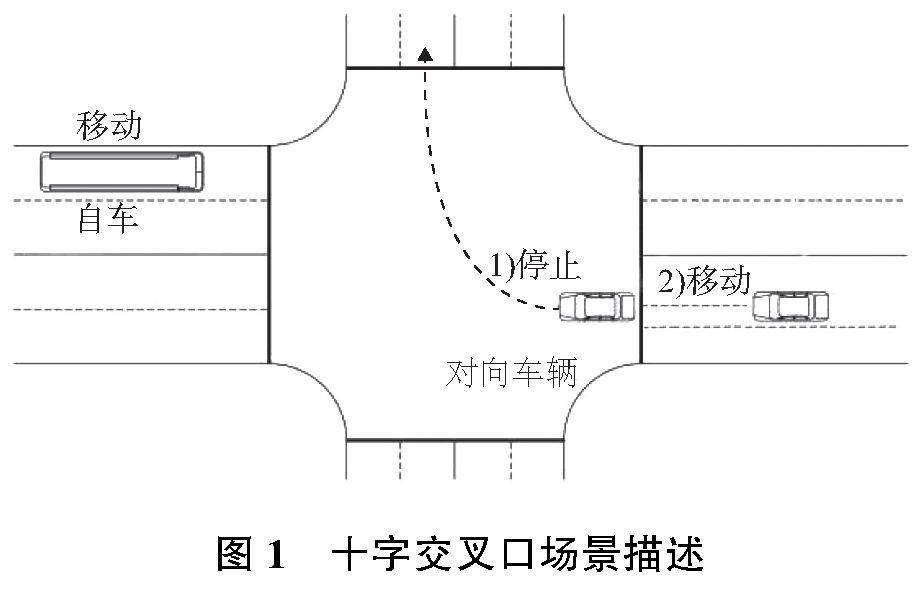
摘 要:针对车辆在十字路口与对面车辆存在潜在的碰撞风险,提出一种基于估算速度的控制方法。搭建仿真环境进行多次测试,对测试数据进行单因素方差分析。结果表明:所提方法可以预测对面车辆的未来轨迹和碰撞时间,并优化自车的行驶速度,从而有效降低了碰撞风险。
关键词:十字路口;交通流;自动驾驶客车;速度控制
中图分类号:U461.91 文献标志码:B 文章编号:1671-5276(2025)01-0295-06
Speed Control of Self-driving Bus Based on Intersection Traffic Flow Scenario
Abstract:This paper proposes an estimation-based speed control method aiming at the potential vehicle collisions with the vehicle from the opposite at the intersection. A simulation environment was built and multiple tests were carried out. One-way analysis of variance was performed on the test data. The results show that the proposed method can predict the future trajectory and collision time of the opposite vehicle, optimize the driving speed of the vehicle and effectively reduce collision risk.
Keywords:crossroads; traffic flow; self-driving bus; speed control
0 引言
自动驾驶发展至今,如何确保自动驾驶车辆在与周围交通流交互时的安全性仍然是最具挑战性的问题之一。(剩余7780字)
