一种对接机构的误差分析与可靠度分析

打开文本图片集
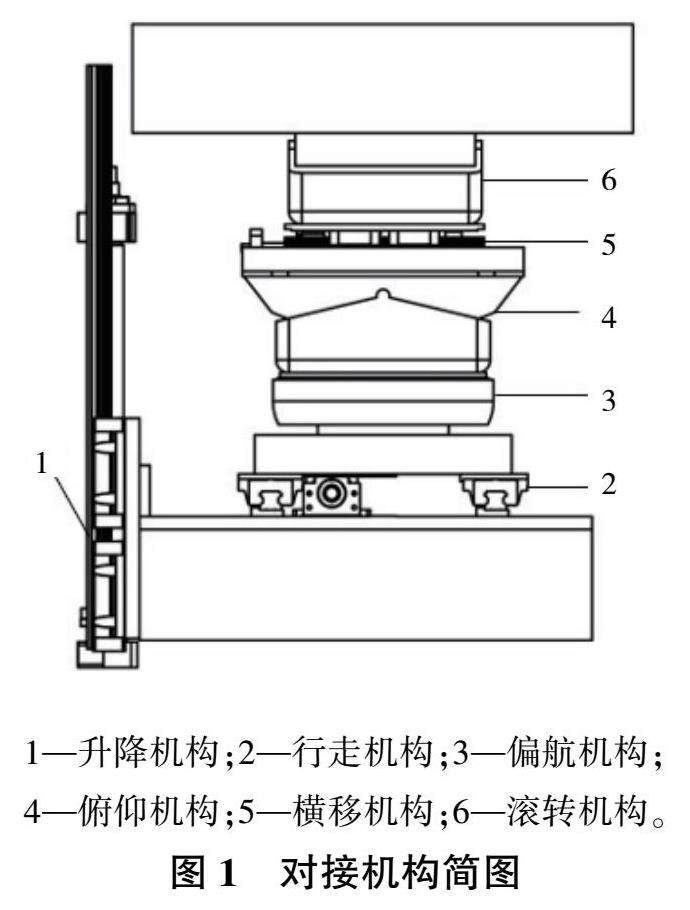
摘 要:为满足大型部件的对接工作要求,采用一种6自由度对接调姿机构。通过D-H法对机构建立运动学数学模型,进行正逆向运动学分析。对机构末端进行位姿误差分析与可靠度分析,得到末端位姿误差与各关节运动学参数之间的关系,分析出对末端误差影响最大的误差源,为后续提高精度提供理论依据。
关键词:对接机构;运动学;误差分析;可靠度分析
中图分类号:TH115 文献标志码:B 文章编号:1671-5276(2024)02-0079-04
Error and Reliability Analysis of Docking Mechanism
DAI Ping1, WANG Qingyun2
(1. School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;
2. Jiangsu Jinling Institute of Intelligent Manufacturing Co., Ltd., Nanjing 210006,China)
Abstract:In order to meet the docking requirements of large components, a 6-DOF docking attitude adjustment mechanism is adopted. The kinematics mathematical model of the mechanism is established by D-H method, and the forward and inverse kinematics are analyzed. The position and pose error and reliability of the end of the mechanism are studied to obtain the relationship between the position and pose error of the end and the kinematics parameters of each joint, and the error source grealy affecting the end error is analyzed, which provides a theoretical basis for the subsequent improvement of accuracy.
Keywords:docking mechanism;kinematics;error analysis;reliability analysis
0 引言
大型精密部件的对接装配是决定产品制造效率和质量的关键环节。(剩余4783字)
