列车自动驾驶规划与控制技术研究

打开文本图片集
中图分类号:U272 文献标志码:B doi:10.20213/j. cnki.tdcl. 2024. 11.07.01
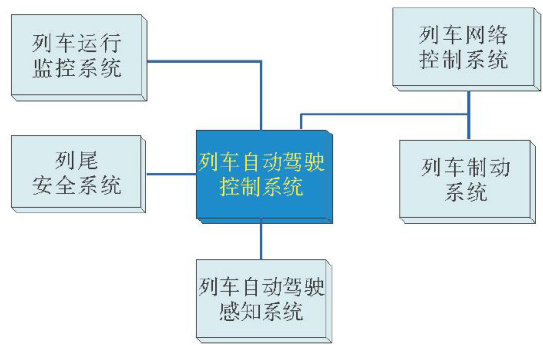
Abstract:This paper studies the automatic driving control technology of freight trains and proposes an automatic driving control system with perception,planning and control that integrates the existing network and signal system.A target curve planning method is proposed based on the train signal,line information data,and train model. The information about train running conditions,target force,target air brake decompression,and so on is planned in real time. With the target curve information as the control fedforward,the feedforward control technology with operating condition constraints is used to control the train operation in real time. In order to improve the accuracy of control,the parameter identification technology based on the Kalman filter is adopted. Speed and acceleration information are used as state quantities to identify train parameters. According to the proposed train automatic driving control framework of planning-control-parameter identification,the whole-line train automatic driving testfrom zero speed activate to aceleration,interval operation,deceleration and stop has been successfully carried out on the test train. The test results indicate that the control method proposed in this paper is practical and meets application requirements.
Key words: railway freight car; autonomous operation; movement planning; feedforward control; parameter identification;Kalman filter
人工智能技术在近年来取得了快速发展,利用智能化技术为工业产品赋能成为重要发展趋势。(剩余6699字)
