基于物理信息强化学习的无人驾驶车辆跟驰控制模型

打开文本图片集
中图分类号:TP181 文献标志码:A 文章编号:1001-3695(2025)06-012-1691-07
doi:10.19734/j. issn.1001-3695.2024.11.0473
Physics-informed reinforcement learning-based car-following control model for autonomous vehicles
Zhou Ruixiangla,Yang Dalb,Zhu Liling²+ (1.a.ScholeicoptiouUit China;2.School ofBusiness,SichuanNormal University,Chengdu 61o1oo,China)
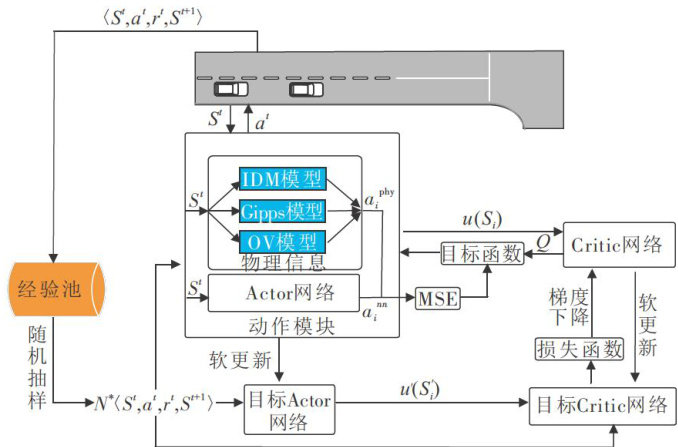
Abstract:Car-folowing controlisafundamental technique forautonomous driving.Inrecentyears,einforcementlearning hasbeenwidelyadopted incar-folowing tasks,enabling models toexhibit strong learning andimitationcapabilities.However, reinforcement learning-based modelsface chalenges such aspoor interpretabilityandunstableoutputs,which pose potential safetyrisks.Toaddresstheseissues,thispaper proposedaphysics-informedreinforcementlearningcar-following model.The model incorporatedvehicledynamics,defined continuous stateandaction spaces,andintegrated threeclasicalcar-following models withreinforcementlearning to enhancestabilityand interpretability.Itconstructedasimulationenvironmentbyusing PythonadtheSUMOtraficsimulatortotrainthePIRL-CFmodel.Comparativeexperiments wereconductedagainsttraditional car-folowing modelsandmainstreamdeepreinforcementlearning models(DDPGandTD3).Experimentalresultsshowthat the PIRL-CF model improves the proportion of comfort zones by 8% compared to deep reinforcement learning models. Additionaly,itincreasestheminimumtime-to-colisionbyO.3sandtheaverageheadwaydistancebyO.21scomparedtotraditional models.Theseresultsdemonstratethat thePIRL-CFmodelachieves abalanceofsafety,comfort,anddri-ving effciency in car-following tasks,providing an efective solution for autonomous driving decision-making.
Key Words:vehicle folowing;reinforcement learning;depth deterministic strategy gradient;physical information
0 引言
近年来无人驾驶技术受到了世界范围内的广泛关注,其中车辆跟驰控制是无人驾驶的基础控制技术之一。(剩余18010字)
