面向自动驾驶的多尺度目标三维检测算法

打开文本图片集
关键词:自动驾驶;单目相机;三维目标检测;多尺度感知;特征融合;注意力机制;机器视觉中图分类号:TN911.73-34;TP391.41 文献标识码:A 文章编号:1004-373X(2026)01-0141-07
Multi-scale object 3D detection algorithm for autonomous driving
LIUMan,CHEN Xiaonan (SchoolofInformationScienceandTechnology,DalianMaritimeUniversity,Dalian116O26,China)
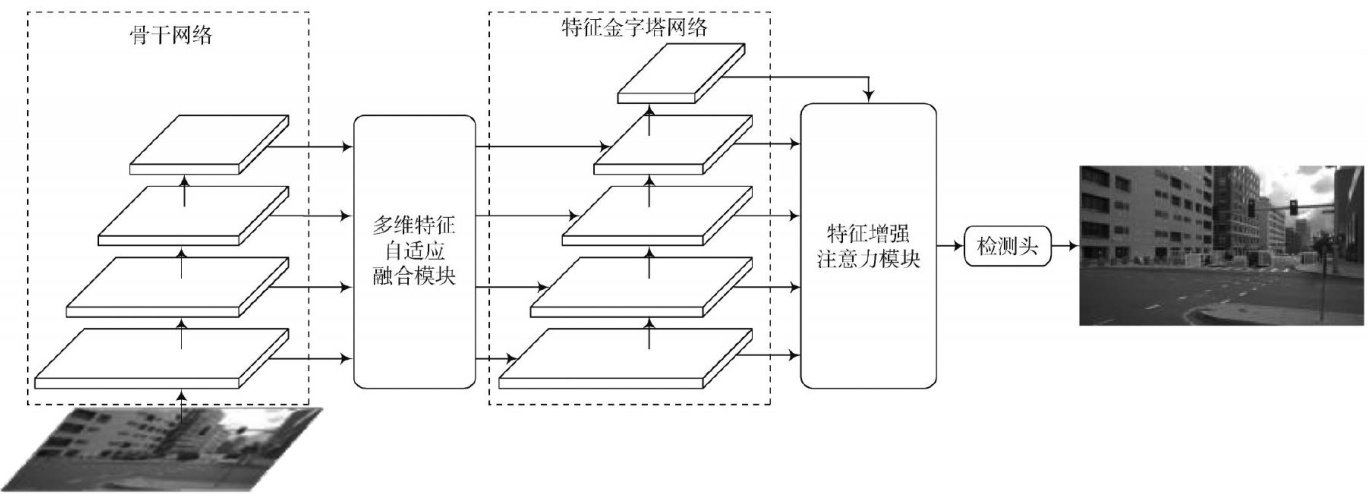
Abstract:Inautonomous drivingscenarios,3Dobject detectionusingamonocularcamera isachallnging task,especilly incomplexroadenvironments,becausethediferencesofobjectscaleandoclusioncanleadtofalsepositivesormised detectionseasily.Inviewof theabove,amonocular3Dobjectdetectionalgorithmbasedonfeaturefusionandenhancementis proposed.Firstly,aFasterNet+isconstructedandtakenasthebackbonenetwork,andtheembeddinglayerandblockstructure areoptimizedtoenhancetheextractionofdetailedinformation,improving theoverallperformanceofthenetwork.Next,a multi-dimensionalfeatureadaptivefusionmoduleisdesignedtoadaptivelyselectandfusehigh-dimensionalandlow-dimensional features,eliminatingthefactsofthesmallobjectinformationlossinhigh-dimensionalfeaturesandthelackofcontextual informatininlow-dimensionalfeatures.Finaly,afatureehancementatentionmoduleisintroducedtoiglighttereasfor specificobjects,furtherimprovingthenetwork'saccuracyinobjectlocalizationandclasification.Experimentalresultsonthe nuScenesdataset demonstratethatthemAPandNDSof theproposed methodisimprovedbyO.O38andO.O35,respectively,in comparisonwiththebaselinemethod,andthattheproposedmethodcandetectobjectsofdiferenttypesandscalesffectively andexhibitsstrongerrobustnessInaword,theproposedmethodprovidesanewideaformulti-dimensionalojectdetectinin autonomous driving scene.
Keywords:autonomousdriving;monocular camera;3Dobjectdetection;multi-scale perception;feature fusion;attention mechanism;machinevision
0 引言
随着科技进步和智能需求增长,自动驾驶、智能交通和机器人等技术成为发展焦点,而目标检测作为其中的关键技术也愈发重要。(剩余9065字)
