基于LM算法的三维点云与二维图像标定方法

打开文本图片集
中图分类号:TN911.73-34;TP391 文献标识码:A 文章编号:1004-373X(2026)01-0059-07
DOI:10.16652/j.issn.1004-373x.2026.01.010引用格式:,等.基于LM算法的三维点云与二维图像标定方法[J].现代电子技术,2026,49(1):59-65.
3D point cloudsand 2D image calibrationmethod based on LM iterative algorithm
WULong',TAOYifan,YANG Xu1 ,XU Lu1 ,CHENShuyu² (1.SchoolofComputerScienceand Technology,ZhejiangSci-TechUniversityHangzhou31oo18,China; 2.KeyiCollegeofZhejiangSci-TechUniversity,Shaoxing312369,China)
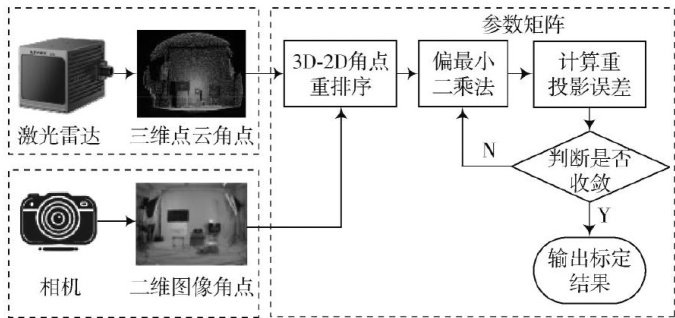
Abstract:Theinsuffcientcalibrationaccuracy between LiDARandcameradetectionleads toerrorsinthespatial alignentofLiDARpointcloudsandcameraimages,affctingsubsequentfeaturematching,objectdetection,and 3D reconstructionaccuracy.Therefore,acalibrationmethodbasedonLiDAR3Dpointcloudsand monocularcamera2Dimages is proposed.Themethodaimstoachieve precisedetectionoflarge-scaleobjectsand 3Denvironmentreconstructio.Inthemethod, multi-framepointclouddataacumulationisusedtoobtainrelativelydensepointcloudmeasurementsandacornerdetection algorithmisappliedtodetectfeaturecornersintheimages.Subsequentlytheparametersaresolvedwithpartialleastsquares (PLS).Finally,theLevenberg-Marquardt(LM)iterativealgorithmisemployedtominimizethereprojectioneror,thereby improvingcalibrationacuracy.ThecalibrationresultsshowthatthereprojectionerroroftheSPAAMalgorithmisreduced by 8.6%incomparisonwiththatof theclasical methods,whiletheproposedmethodachievesanearly 38.2%reductionin reprojection error incomparison with that of the classical methods,validating its accuracyand efectiveness.
Keywords:LiDAR; monocular camera; calibration method;point cloud data; PLS; LM iterativealgorithm
0 引言
激光雷达在检测大型物体形变(如火车站顶棚)中发挥着重要作用,但单一的激光雷达无法实现全方位检测,因此通常需要进行多传感器数据融合,在各种融合算法中,激光雷达与相机的组合最为常见[1-3]。(剩余10730字)
