基于FPGA的轻量化自适应ORB算法研究与实现

打开文本图片集
DOI:10.16652/j.issn.1004-373x.2026.01.018引用格式:,等.基于FPGA的轻量化自适应ORB算法研究与实现[J].现代电子技术,2026,49(1):117-123.
中图分类号:TN911.73-34文献标识码:A
文章编号:1004-373X(2026)01-0117-07
Research and implementation on FPGA-based lightweight adaptive ORBalgorithm
WANGDingxuan,YAORongbin,ZHAO Zhonghua,LI Xiaohuan (Schoolof Informationand Communication,Guilin Universityof Electronic Technology,Guilin541oo4,China)
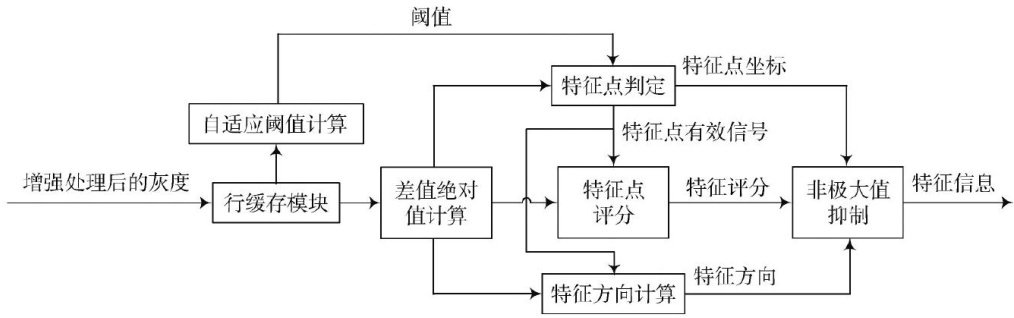
Abstract:Inorder toreducecomputationcomplexityandimprovethereal-timeperformanceofORBalgorithm,andgetrid ofthefacthatthealgorithmfilstodetectthefeaturesinthelightchangeandlowtexturescensduetoitsfixedthresholda lightweightadaptiveORBalgorithmaccelerationarchitecturebasedonFPGAisproposed.Firstly,thefeaturedirection calculationoftheORBalgorithmisimprovedbyadoptingaregion-basedfeaturedirectionangleanddescriptorcalculation method,whichreduces teconsumptionofcomputingresources.Incombinationwiththeparalelizationandpipelinecomputing advantagesofFPGA,alightweightORBaccelerationarchitectureisdesigned.Secondly,ahistogramequalizationalgorithmis addedonthebasisof theoriginalalgorithmtoadjustthebrightnessoftheimage,improvethecontrastoftheimage,andmake thefeaturedetailsoftheimagemoreprominent.Anadaptivethresholdcalculationmethodisdesignedforthefixedthresholdof theORBalgorithm,which increasesthenumberoffeature pointsextractedbythealgorithm inweak lightingandlowtexture scenes.Teexperimentalresultsshowthatincomparisonwiththesoftwarealgorithmimplementation,thehardwareacceleration architecturebasedonFPGAcanachievea16.1timesaccelerationefect.Thenumberoffeature pointsextractedunderweak lightingandlowtextureconditionsis6.67timesand2.56timesthatofORBalgorithm,respectively,andthenumberoffeature matchingpointpairsis5.62timesand1.5timesthatofORBalgorithm,respectively.Itcanbeseenthatthealgorithm acceleration isachievedandresourceconsumptionisreduced,andtheadaptabilityandtherobustnessofthealgorithmin different scenarios are enhanced.
Keywords:ORB;featuredetection;FPGA;lightweight;histogram equalization;adaptive threshold; weak lighting;lowtexture
0 引言
ORB(OrientatedFASTandRotatedBRIEF)算法是一种具有代表性的特征点提取算法,具有良好的旋转和尺度不变性,被广泛应用在VSLAM、三维重建、图像拼接等场景,但这些应用大多是无人机、机器人、自动驾驶等平台,而ORB算法的计算量对于这些应用仍然很大,无法满足实时性和低功耗的要求;与此同时,传统的ORB算法固定阈值,在光照充足和纹理特征强的场景适用,而在弱光照或低纹理特征的场景下,无法保证提取到足够多的特征点,难以真实反映图像的特征信息,导致后续的匹配结果不理想。(剩余8016字)
