分层优化机制引导的视觉机械臂联合模型优化

打开文本图片集
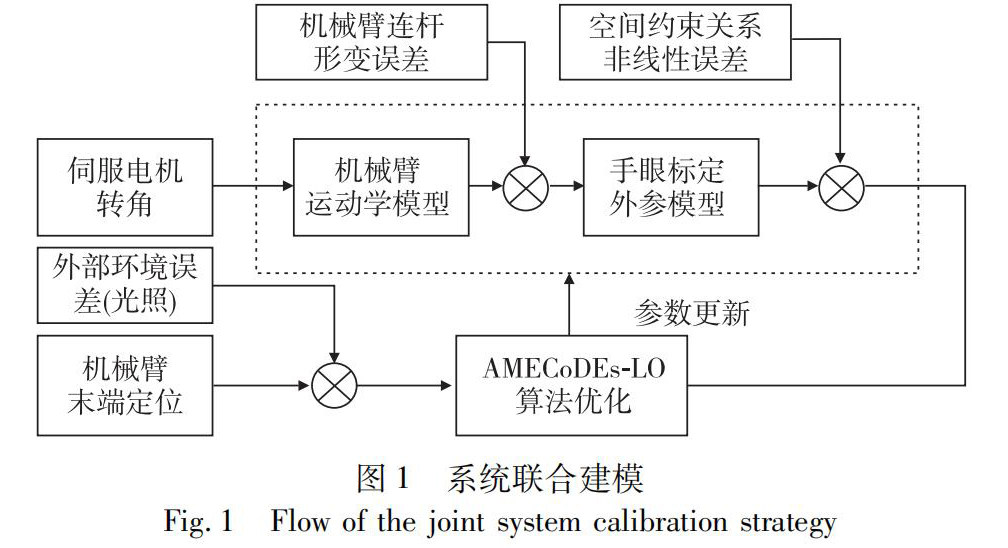
摘 要:针对视觉机械臂系统整体精度不高、不易部署、校准成本高的问题,提出了具有分层优化机制的自适应多精英引导的复合差分进化算法(AMECoDEs-LO)。首先,对机械臂运动学模型和手眼标定外参模型进行系统集成;然后,以AMECoDEs算法为基础对种群中阶段性数据进行主成分分析,按照当前代各维度向量支配度的不同,划分参数优化的优先级,以参数降维优化的思想实现了对种群收敛精度和速度的隐式引导,在仿真和真实环境下与现有的一流演化算法进行了对比验证;最后针对视觉传感器对环境噪声敏感问题,加入不同强度的高斯白噪声验证系统的鲁棒性。(剩余15176字)
