MATLAB/Simscape在机械手仿真教学中的应用

打开文本图片集
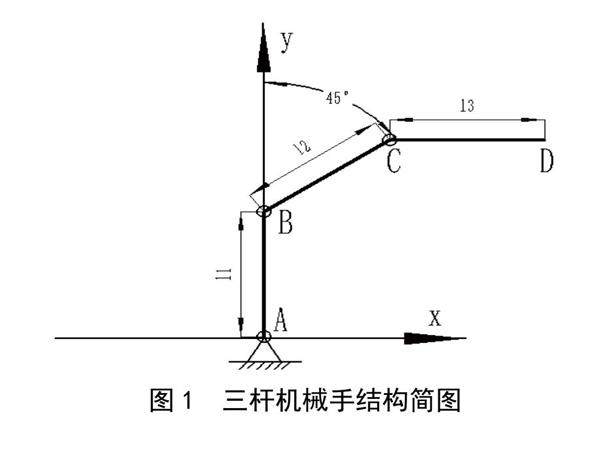
摘 要 针对机械手教学过程中的动力学问题,以一个三杆机械手为例,利用Simscape模块库进行仿真教学建模,并详细介绍其基本组成模块,根据机械手的结构简图可直接建立物理仿真模型,通过仿真结果可直接观察到各杆臂的运动轨迹及各关节的运动参数。
关键词 MATLAB;Simscape;机械手;仿真试验
中图分类号:G642.423 文献标识码:B
文章编号:1671-489X(2022)02-0041-03
Application of MATLAB/Simscape in Manipulator Simu-lation Teaching//QIN Zhiying, ZHAO Jifu, ZHAO Yuejing, LU Zian, WANG Wei
Abstract Aiming at the dynamics problem in the manipulator
teaching process, taking a three-bar manipulator as an exam-ple, the Simscape module library is used for simulation tea-
ching modeling, and its basic components are introduced in detail, according to the structure diagram of the manipulator can be directly set up simulation model, through the simula-tion results can be directly observed the lever arm of the tra-jectory and motion parameters of each joint.
Key words MATLAB; Simscape; manipulator; simulation experiment
0 引言
机械手是自动化生产过程中逐渐出现的一种新型工业设备,随着《中国制造2025》的提出,工业机械手成为智能制造必不可少的设备,而社会上操作维护机械手的技术人员相对紧缺,故各高校纷纷开设机器人相关课程[1]。(剩余3059字)
