基于多域卷积特征决策融合的SLAM回环检测算法

打开文本图片集
关键词:回环检测;视觉SLAM;卷积神经网络;多任务域;决策融合;特征提取;D-S理论图分类号:TN911.6-34;TP391.4 文献标识码:A 文章编号:1004-373X(2025)20-0181-06
SLAM loop closure detection algorithm based on multi-domain convolutional featuredecisionfusion
YUZhipeng',WANGChengjun1,ZHAO Yanqiu',REN Donghai² (1.SchoolofArtificial Inteligence,AnhuiUniversityofScienceandTechnology,Huainan232oo1,China; 2.Huaibei Zhongtai Electromechanical EngineeringCo.,Ltd.,Huaibei 235ooo,China)
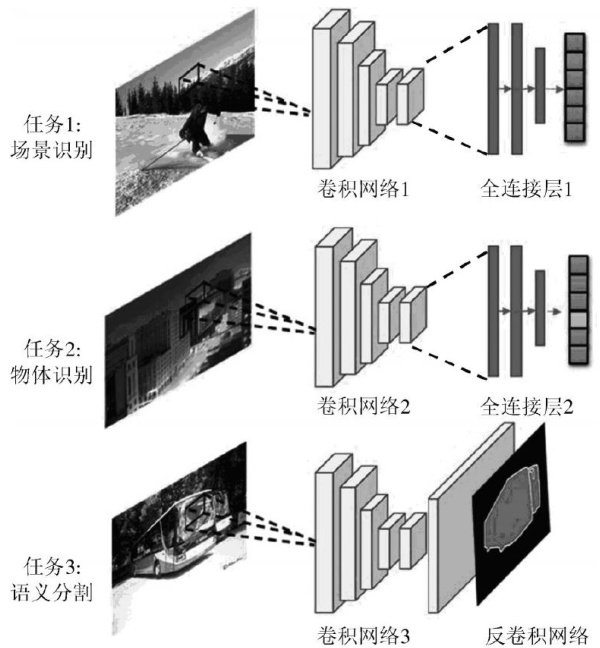
Abstract:Loopclosure detection,asacrucial componentin simultaneous localizationand mapping (SLAM),caneffectively reducetheaccumulationerorsofposeestimationandyieldaconsistentglobalmap.Withthedevelopmentofdeeplearning,the convolutinalneuralnetworks(CNNs)begintobeappliedfortheloopclosuredetection.However,thefeaturerepresentationof CNNsisnot widelyappliedduetothedomainspecifity.Inorder toenhancetheaplicabilityofconvolutionalfeaturesinloop closuredetection,aSLAMloopclosuredetectionalgorithmbasedonmulti-domainsconvolutionalfeaturedecisionfusionis proposed.The algorithmcanlearnfeaturerepresentations from multi-task domains andcanbeused forthe featureextraction and decision-makingof theloopclosure detection.Thedecision-makingfrommulti-taskdomain featuresarefused basedonD-S theorytoobtaintheresultsofloopclosuredetection.TheexperimentswereconductedontheNew CollgeandCityCentre datasets.Itdemonstrates thattheloopdetectionalgorithmbasedonmulti-domainconvolutional featuredecisionfusioncan improve the accuracy of 2.292% , 6.88% ,and 16.98% on the New College dataset, respectively,compared with the scene feature decision,thebjectfeaturedecision,andthesemanticfeaturedecision.OntheCityCentredataset,theaccuracyisincreasedby 6.23% , 10.33% ,and 13.97% ,respectively.The experimental results indicate that the proposed method can enhance the accuracy ofloopclosuredetectionbasedonconvolutionalfeatures,therebyproviding guarantee forthepreciselocalizationand mapping.
Keywords:loopclosure detection;visual SLAM;convolution neural network;multi-task domain;decision-making fusion; feature extraction; D-S theory
0 引言
LocalizationandMapping,SLAM)中最重要的问题之一。(剩余8149字)
