多模态水下航行器变体积建模方法研究

打开文本图片集
中图分类号:TN743-34;TP29 文献标识码:A 文章编号:1004-373X(2025)20-0025-05
Abstract:Theexistingconstant-volume dynamic model cannot accurately express thedynamiccharacteristicsof multimodalunderwatervehicles.Onthisbasis,consideringthecontrolneedsofmodalswitchingandthevolumechangeof the buoyancydrivesystem,avariable-volumemulti-mass pointvariablepositionvectormodelisestablishedbasedonthecoordinate transformationmethod.Onthebasisofmodeling,thecomparativeexperimentswerecariedout,andthediferencesbetweenthe pitchanglesexpressdbydiferentmodelsinthemodeswitchingactionscenewereanalyzed.Theresultsshowthatthevariablevolumemulti-masspointvariablepositionvectormodelcandescribethepitchanglemoreacurately,whichcanbeermtthe controlneedsofmodelswitching incomplexenvironments,andhaspracticalsignificanceforthemotionsimulationandcontroller designof similarvehicles.
Keywords:multi-modal underwater vehicle;variable-volume model;modalswitching;pitchanglecontrol;positionvector; coordinate transformation
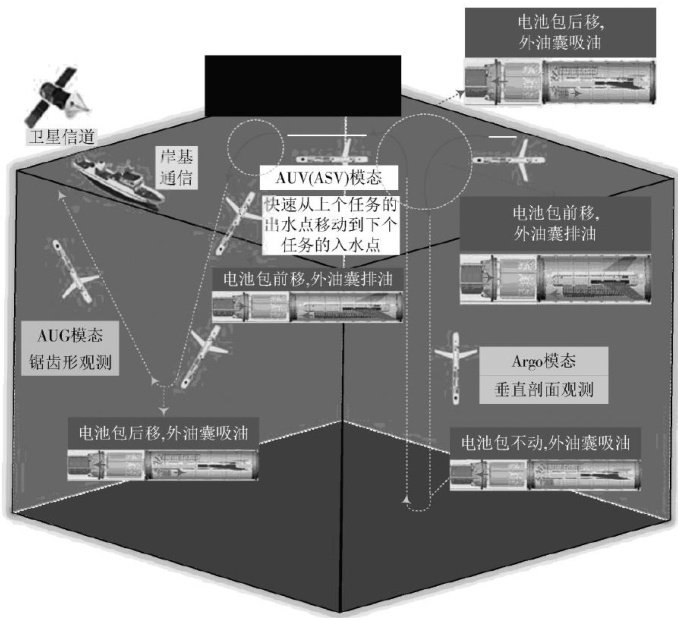
海洋环境实时观测是“透明海洋"计划的重要内容。(剩余6728字)
