基于Point-Attention点云分类的激光雷达故障诊断方法研究

打开文本图片集
中图分类号:TN958.98-34 文献标识码:A 文章编号:1004-373X(2025)20-0010-08
MethodofLiDARfaultdiagnosisbasedonPoint-Attention pointcloudclassification
TAN Guangxing, CHENG Xing, CHEN Haifeng (School of Automation,Guangxi Universityof Science and Technology,Liuzhou 545ooo,China)
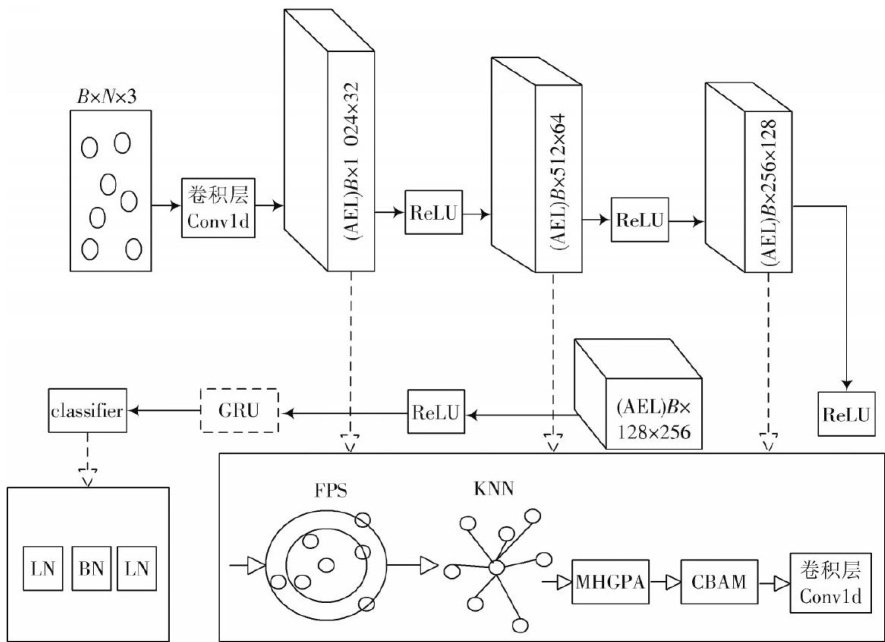
Abstract:Inthefieldof intellgentvehiclesandautonomousrobots,LiDARsensorsarewidelyusedforenvironmental perceptionandobjectdetectionduetotheirhighprecisionandreliability.Therefore,faultdiagnosisofLiDARisparticularly important.InternalfaultsofLiDARoftencomewithfirmwarealerts,butfaultdetectioncausedbyexternalenvironmentalfactors presentsgreater challenges.For example,occlusion faultsinLiDARpoint cloudscaused byvehicle deformationordirtare difcult torflectdirectlyatthefirmwarelevelandcanonlybediagnosedbymeansofexternaldetection.Onthisbasis,a methodofPoint-Atention-basedLiDARocclusionfaultdiagnosisisproposed.Themodel'sabilitytoextractkeyfeaturesfrom pointclouddataisenhancedbycombiningwithmulti-head geometricatentionmechanismmodule,CBAMmoduleandresidual conectionmechanism,therebyimproving clasficationaccuracyandrobustness.Onthereal ScanObjectNNdatasetandthe ModelNet4Obenchmarkdataset,theexperimentalverificationofthePoint-Attentionmodelisconducted.Itcanrealize classification accuracy of 93.7% and 82.5% ,respectively.The time feature capture mechanism is fused to make model better adapttothetemporalcorelationinrealscenarios,therebyhandlingLiDARocclusionfaultsmoreacurately.Theexperimental resultsdemonstrate thattheproposedmethodcanefectivelydiagnoseLiDARoccusion faults,andbestoverallaccuracycan reach over 99% ,providing an eficient and accurate solution forLiDAR fault diagnosis.
Keywords:LiDAR;fault diagnosis;pointcloud classfication;residualconnection;occlusiondetection;time featurecapture
0 引言
在智能车辆和自主机器人领域,激光雷达(LiDAR)
传感器因高精度和可靠性,被广泛应用于环境感知和物体检测。(剩余16969字)
