车规级自动驾驶软件开发中预测规划算法的性能瓶颈突破研究

打开文本图片集
中图分类号:U462 收稿日期:2026-01-19 DOI:10.19999/j.cnki.1004-0226.2026.04.010
Research on Breakthrough of Performance Bottleneck of Predictive Planning Algorithm in the Development of Vehicle Grade Autonomous Driving Software
Qian Changgui Pan Asia Technical Automotive Center Co.,Ltd.,Shanghai 20oooo,China
Abstract:Predictive plannngalgorithmis thecoreofautonomous driving decision-making system,butitfacesmultipleconstraintsofreal-t,generalization,dlitiiclevelapplicatio.issudystematicallalystfourjore formancebotlenecksoftealgitcuingteoradictinbtweenomputatioalomplexitydeal-ti,nsuicee generalizatiolitepeabiltetareotitsspsteesuriat egiesarepropoed,amelyghtweightndentcitecturesig,oftwareandrdwarecollboratieotiationeedaptationmechanism,andverfiabiltyenancement.Withtheelpofquantitivegoalsandngieringpracticeverfcation,theinfer ence delay is compressed from 100ms to less than 50ms ,and the long tail scene adaptation ratio is increased from 60% to over 85% , providing system solutions for large-scale commercial use of autonomous driving.
Key words:Autonomous driving;Prediction planning algorithm;Performance botleneck;Lightweight design
1前言
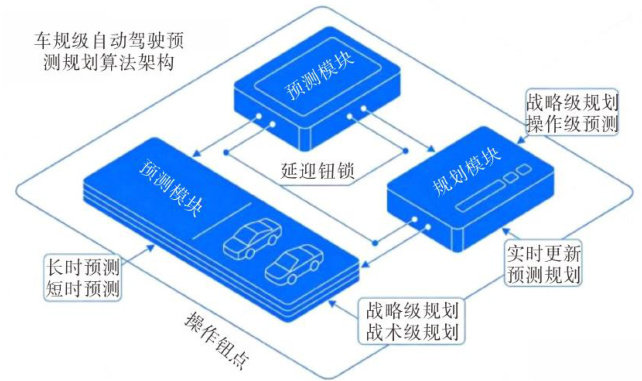
自动驾驶的决策关键是准确预测周边交通参与者的行为,然后据此规划安全行驶轨迹。(剩余5637字)