松散介质下机器人螺旋钻进机制分析与机构设计研究

打开文本图片集
中图分类号:TH112 DOI:10.16578/j.issn.1004.2539.2026.02.006
0 引言
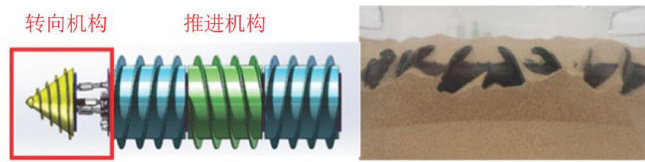
近年来,钻进机器人凭借自动化作业优势,在资源勘探、行星探测、地质取样等领域备受关注。国内外学者围绕复杂工况适配性展开深入研究,提出多款兼具创新性与实用性的技术方案。钻进机器人按核心推进方式可分为冲击挤压式与螺旋切削式两类:冲击挤压式机构通过高频冲击与挤压协同作用,使介质颗粒发生塑性变形或位移,进而形成稳定孔道,典型代表如英国萨里大学基于木蜂产卵器仿生原理开发的钻进取样器及哈尔滨理工大学设计的仿蚯蚓式拱泥机器人[2,均通过攻泥机构的高频冲击挤压实现孔道成型;螺旋切削式则依托螺旋结构的螺旋升角效应,将旋转运动转化为轴向推进力,同时通过切削或扰动介质完成钻进,具有推进效率高、孔道成型质量好等特点,例如哈尔滨工业大学受尺蠖运动机制启发设计的星壤取样器[3及美国加州理工学院与宇航局联合开发的雪地自主行走地外生物学现存生命探测器(ExobiologyExtantLifeSurveyor,EELS)机器人4,均以螺旋结构为核心实现推进与钻进功能。(剩余13607字)
