循迹避障智能小车设计及分析

打开文本图片集
中图分类号:U462.1 收稿日期:2025-04-12 DOI: 10.19999/j.cnki.1004-0226.2025.07.011
Design and Analysis of Smart Cars for Obstacle Avoidance
Qiu Chenxi Fuzhou Polytechnic Institute of Technology,Fuzhou 350108,China
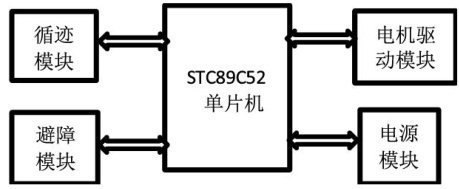
Abstract:Inordertodesignacarthatcandriveautonomously,sensetheenvironmentandavoidobstacles,thispaperprovidesa hardware modelandsoftwarealgorithm.Thesensormeasurement module,controlermoduleandelectricdrivemoduleareadopted, andtheinfraredlightcontroltubeisusedtomeasureandidentifythepathofthebarier-freeblackline,andtesteeigoftheelectric vehicleiseguatedwithorwithoutightreception,soastochievethefunctioofutomatictrackingpositioniformatio.Thisdesign canrealiethefunctionofautomaticrackingpositioninformation,andhashighreliabilityItprovidesanewideaandmetodfortere search of intelligent vehicle for tracking obstacle avoidance.
Keywords:Line following;Obstacle avoidance;Smart car;Microcontroller;Sensor;Module
1前言
随着科学技术的进展,有关人工智能的问题正日益被人重视。(剩余6447字)
