分布式驱动电动汽车转矩分配协调控制研究

打开文本图片集
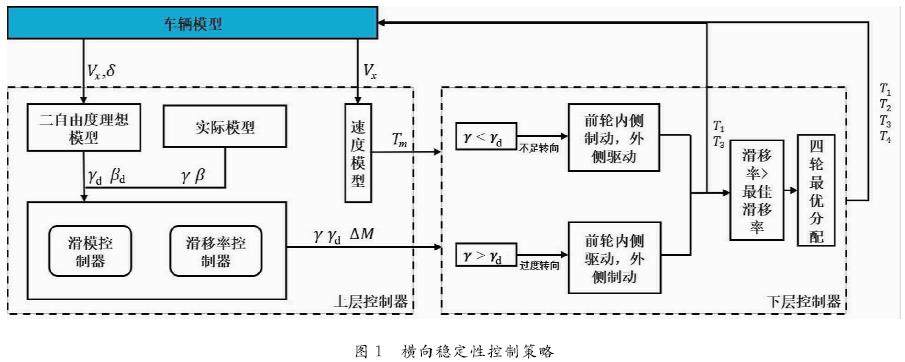
摘 要:操纵稳定性和驱动电机工作效率是电动汽车协调控制的重要指标。针对分布式驱动电动汽车,提出了以直接横摆力矩控制为主的分层控制策略。上层控制器采用滑模控制策略进行目标车速的追踪、滑移率的调整和附加横摆力矩的计算,下层控制器依据滑移率分别设计了前轮独立驱动分配算法和以轮胎利用率最优的分配算法。采用MATLAB/Simulink仿真实验对分层控制算法进行验证,结果表明,所提出的滑模控制策略能将质心侧偏角和横摆角速度控制在理想范围之内,下层控制器的两种分配算法提高了驱动电机的工作效率,且车轮滑移率也控制在较低的范围。(剩余9592字)
