基于动态区域剔除的RGB-D视觉SLAM算法

打开文本图片集
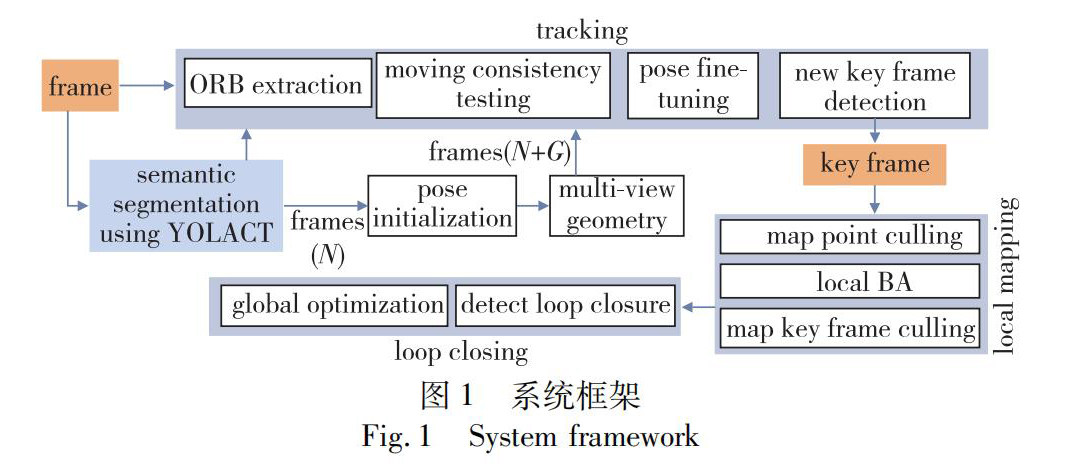
摘 要:针对动态场景下视觉SLAM(simultaneous localization and mapping)算法易受运动特征点影响,从而导致位姿估计准确度低、鲁棒性差的问题,提出了一种基于动态区域剔除的RGB-D视觉SLAM算法。首先借助语义信息,识别出属于移动对象的特征点,并借助相机的深度信息利用多视图几何检测特征点在此时是否保持静止;然后使用从静态对象提取的特征点和从可移动对象导出的静态特征点来微调相机姿态估计,以此实现系统在动态场景中准确而鲁棒的运行;最后利用TUM数据集中的动态室内场景进行了实验验证。(剩余16071字)
