轨道车辆检测系统点云数据仿真方法研究

打开文本图片集
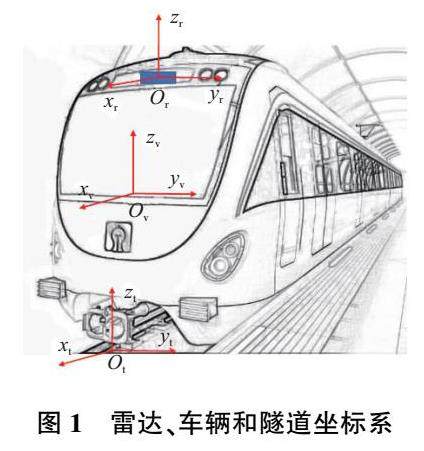
摘要:激光雷达可以通过激光脉冲对目标区域进行密集采样来快速生成三维点云,三维点云数据能够有效地用于环境三维重建、障碍物检测等算法,但轨道车辆在地铁环境下,采集到符合算法要求的激光雷达数据是一项非常具有挑战性的任务,需要消耗大量人力、物力。针对以上情况,提出一种轨道车辆检测系统点云数据仿真方法,通过对地铁隧道和激光雷达传感器建模,利用激光雷达工作原理生成有向激光束,并将有向激光束通过雷达模型和隧道模型的位置关系转换到相同坐标系中,通过光线投射原理来获得仿真数据。(剩余6881字)
