基于目标检测和光流法的动态SLAM算法

打开文本图片集
关键词:目标检测;视觉SLAM;光流法;动态环境;八叉树地图;ORB特征点中图分类号:TN911.73-34;TP242.6 文献标识码:A 文章编号:1004-373X(2025)17-0048-07
Dynamic SLAM algorithm based onobject detection andoptical flow method
YUXiayi, ZHENGEnhui, SUNHaidi (SchoolofMechanicalandElectricalEngineering,ChinaJiliangUniversity,Hangzhou31Oo18,China)
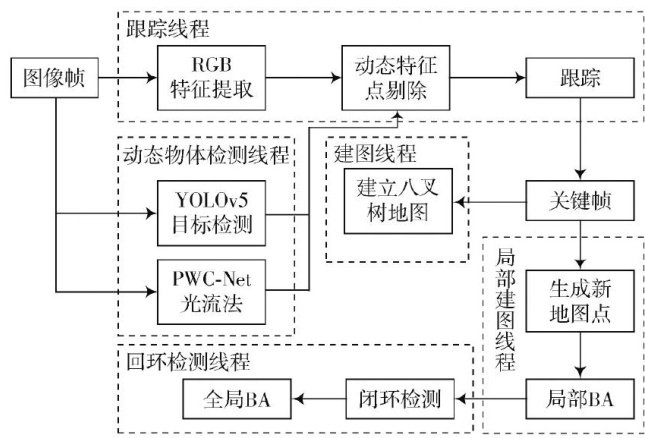
Abstract:Inviewofthefactthat dynamicobjectsaffect theaccuracyofcamerapose estimationinsimultaneous localization andmapping (SLAM) system,a dynamic SLAM system basedon object detectionandoptical flow method is proposed.Thesystemaims toadddynamicobjectdetectionthreadsandmapconstructionthreads totheORB-SLAM2(oriented FASTandrotated BRIEF-simultaneouslocalizationandmapping2)framework.Firstly,thesceneopticalflowinformationis obtained bythePWC-Netopticalflownetwork,andthepotential dynamicarea intheenvironmentisobtainedbytheYOLOv5s objectdetectionnetwork,andthescenedynamicareaisobtainedbythecombinationofthetwo.Secondly,topreventtheissed detectionintheobjectdetectionnetwork,theopticalflowinformationisusedforspeedconstraint,andthedynamicfeature points areeliminatedtwice.Finally,thecameraposeestimationandoctreemapconstructionafterremoving dynamicobjectsare completed.TheEVOisusedtoevaluatethesystemontheTUMRGB-Dpublicdataset.Theexperimentaldatashowthecamera poseestimationaccuracyof theproposedsystemin highdynamicenvironmentisimproved incomparison withtheORB-SLAM2, Dynamic-VINSandDS-SLAMsystems,which indicates thattheimprovement canimprovethe performance of SLAMsystem effectivelyindynamic environment.
Keywords:object detection; visual SLAM;optical flow method;dynamic environment;octree map; ORB feature point
0 引言
同时定位与地图构建(SimultaneousLocalizationandMapping,SLAM)是指在未知的环境中,移动机器人在运动时通过观察环境来确定自己的运动路径,并同时创建出环境地图。(剩余8247字)
