基于改进YOLOv8n的车辆及行人检测

打开文本图片集
DOI:10.16652/j.issn.1004-373x.2025.17.006引用格式:,,.基于改进YOLOv8n的车辆及行人检测[J].现代电子技术,2025,48(17):35-40.
关键词:YOLOV8n;车辆行人检测;小目标检测;损失函数;SPPF;C2f中图分类号:TN911.73-34;TP391.41 文献标识码:A 文章编号:1004-373X(2025)17-0035-06
Vehicleand pedestrian detectionbased on improved YOLOv8nalgorithm
ZHOU Jianxin,HAO Yingjie,HOU Zichuan (CollegeofElectricalEngineering,NorthChinaUniversityofScienceandTechnologyTangshanO63210,China)
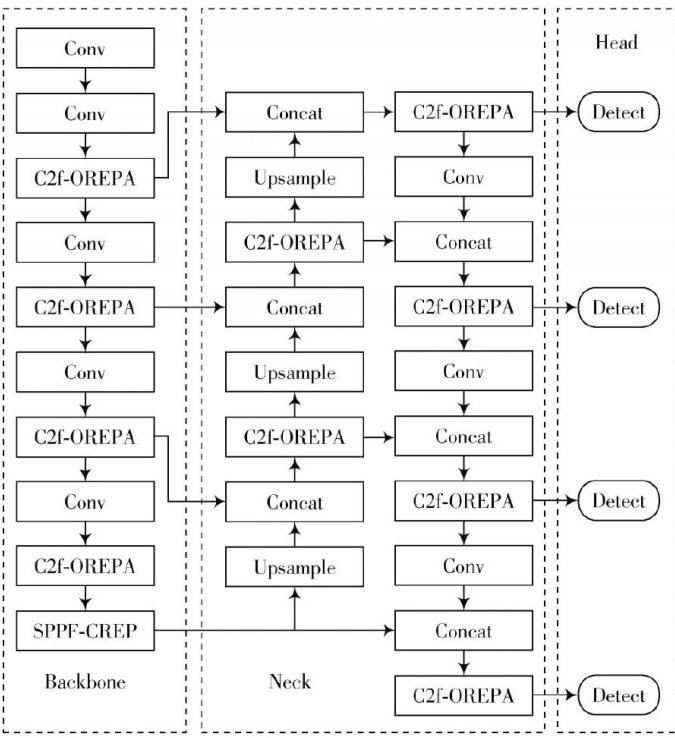
Abstract:Inview of theobject oclusion,overlap,and small object missing in roadscene detection,avehicleand pedestrianobjectdetectionmodelbasedontheimprovedYOLOv8nalgorithmhasbeenproposed.Firstly,anew pyramidpooling layerstructurecaled SPPF-CREPisdesigned toreplace theoriginal network'spyramidpoling layerstructure SPF,nhancing themodel'seficiencyand performance during trainingand inference.Secondly,asmall object detection head (P2) is added to improvethenetwork'sdetectioncapabilityforsmallobjects.Then,theonlineconvolutionalre-parameterization(OREPA)is integratedintotheC2f moduletoenhancetheauracyrateandeficiencyofvehicleandpedestriandetectioninhigh-density environments.Finally,the WIoU- v2 isadopted asan alternative loss function to achieve higher localization accuracy. ExperimentalresultsontheKITTIvehicledetectiondatasetdemonstratesthat,incomparisonwiththeoriginalalgorithm,the accuracyrateof thedetectionoftheimprovedalgorithmisincreasedby3.6%,andthemeanaverageprecision(mAP)is enhanced by 4.2% .This experiment has proven its eficiency and superiority in the detection of vehicles and pedestrians.
Keywords:YOLOV8n;vehicleand pedestrian detection;small object detection;loss function;SPPF; C2f
0 引言
在道路目标检测任务中,传统的目标检测特征泛化能力弱,对复杂场景的性能表现较差1,并且存在准确率低和检测速度缓慢等问题。(剩余8220字)
