一种轮式采花机器人设计
——以黄蜀葵为例

打开文本图片集
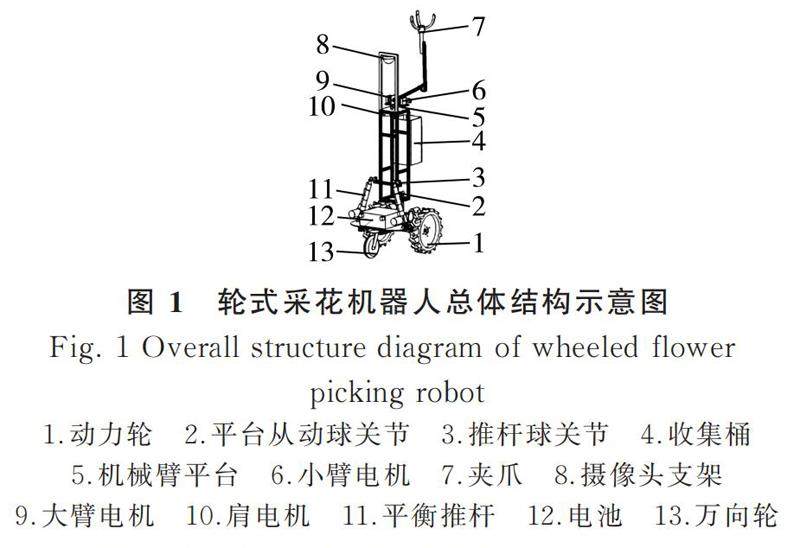
摘要:针对黄蜀葵花朵特定采收的时间和人工采摘效率过低的问题,为实现各类花朵采摘机械化和智能化的需求,以黄蜀葵花朵为例并结合其生长特性,设计一种轮式采花机器人。采用工控机和嵌入式微控制器作为采花机器人的主控系统,执行机构采用电力驱动,以蓄电池供电,通过多个推杆电机、舵机和动态基座(基于航姿参考系统,可自动调节工作平台倾角的机构)构成轮式行走机构,采用两个摄像头分别同时获取黄蜀葵花朵图像,通过深度识别算法以筛选识别可采摘的目标,采用多个舵机配合带轮结构构成机械臂和夹爪的控制机构,以完成花朵的采摘与收集。(剩余14125字)
