立体错位水培生菜自动收获装置设计与试验

打开文本图片集
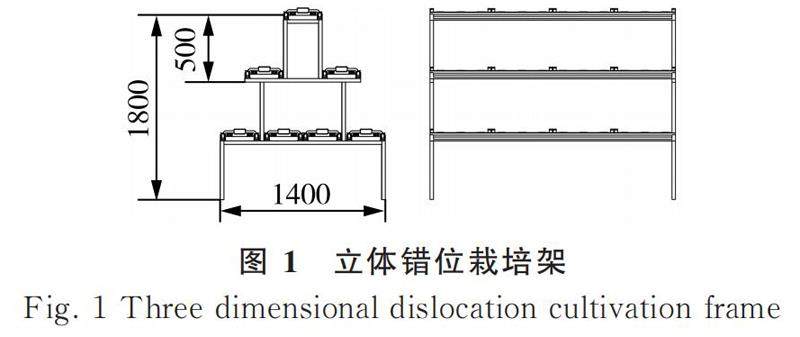
摘要:立体错位栽培架系统可以提高单位面积栽培株数,是一种新型的栽培系统,定植杯模式是该系统种植生菜的主要栽培方式。在水培生菜栽培过程中,存在着人工收获效率低,劳动强度高等问题,通过设计一种定植杯种植模式下的生菜自动收获装置,结合实际生产环节无人化作业方式,利用SolidWorks对收获装置关键部件进行设计;使用ANSYS对收获装置中生菜采收机构进行模态分析,对定植杯夹持手爪和生菜夹持手进行有限元分析,优化结构,完善设计;最后进行剪切试验,得出结论:当滑切角度为20°、切割气压为0.3 MPa、切割位置为生菜底叶4 mm处时,生菜根茎剪切力达到最小值6.31 N,用于指导切茎部件设计。(剩余14986字)
