设施猪场悬挂式轨道巡检机器人设计与试验

打开文本图片集
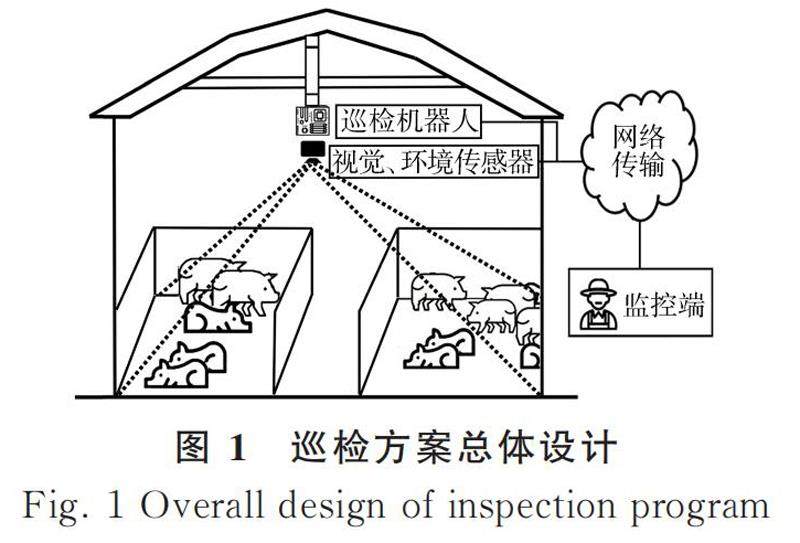
摘要:为解决猪场传统巡检方式成本高、效率差、智能化水平低等问题,以中小型规模设施猪场结构特点为依据,提出基于悬挂轨道的巡检方案,设计一种悬挂式智能巡检机器人,开发适用于典型猪场环境的巡检机器人运动控制系统和上位机软件,并进行现场测试。结果表明:设置实现巡检机器人常态巡检速度可大于0.15 m/s,单次运动定位误差小于2.5 mm,巡检定位误差整体小于10 mm,误差率小于0.18%,巡检机器人可进行环境数据和图像自动获取,为后续的生猪健康状况分析提供数据支撑。(剩余12719字)
