水产养殖机器人推进器设计与运动建模

打开文本图片集
I图分类号:TP242 文献标志码:A 文章编号:1004-6755(2025)11—0076-03
Design and motion modeling of robotic thrusters for aquaculture
CHENJie1,LUO Ji²
(1.School of Naval ArchitectureandOcean Enginering,Nantong Instituteof Technology,Nantong 226oo2,China; 2.School of Mechanical Engineering,Nantong Institute of Technology,Nantong 226o02,China)
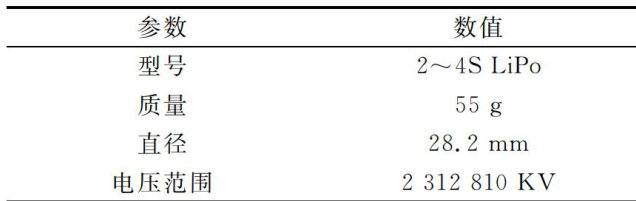
Abstract:As underwater robots are increasingly widely used in the field of aquaculture,motion control of underwater robots has become one of the research hotspots and challenges. To improve the power system of underwater robots,a thruster suitable for aquaculture was designed.Following the overall design,motor selection,and electronic speed controller (ESC) selection for the thruster,thrust testing experiments were conducted. Additionally,to facilitate future controller research and design,a six—degree-of-freedom motion model of the underwater robot was established,aiming to provide foundational data for subsequent simulation experiments.
Key words:aquaculture;underwater robots; thruster design; thrust testing;motion modeling
水下机器人是典型的跨学科平台,涵盖机械、电子、计算机与自动控制等技术,已逐步渗透至水产养殖行业。(剩余3444字)
