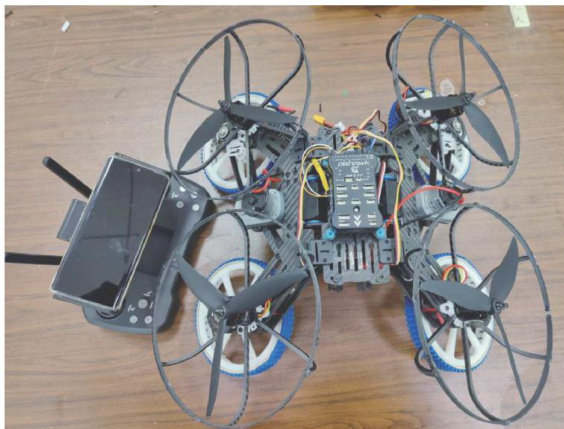
多旋翼爬壁机器人设计与控制方法

打开文本图片集
关键词:多旋翼飞行;爬壁;数学模型;滑模控制;自适应控制
DOI:10.15938/j. jhust.2025.04.001
中图分类号:TP242.6 文献标志码:A 文章编号:1007-2683(2025)04-0001-10
Research on Design and Control Method Multi-rotor Wall-climbing Robot
XU Linsen 1,2,3 , ZHU Jian’,CAI Jianchen’, MEI Huan’, ZHANG Zhuangzhuang' (1. ,
2. Key Laboratory Intelligent Manufacturing Technology and Equipment,Changzhou 213OOo,
3.Suzhou Research Institute Hohai University,Suzhou 215OOO,China)
Abstract:Thispaperpresentsthedesignamulti-rotorwal-climbingrobotcapableperformingthetasksbothtraditional wal-climbingrobotsanddrones.Toadressthecontrolchallngesduringmode transitions,acontrolschemecombiningadaptive controlandsliding modecontrolisproposedtomitigatetheinstabilitycausedbymodeswitching.Theschemeincludesslidingmode controlforgroundmovementandactivedisturbancerejectionslidingmodecontrolforflightmode.Slidingmodecontrolisusedto achieveystemstablity,whileadaptivecontrolompensatesforunknondisturbances,alowingtherobottoetivelyandeeteal perturbationsandinteralparametervariationsforprecisecontrolincomplexenvironments.Aditionaly,theminimumthrust requirementforwal-climbingmodeiscalculated.Aftercompletinghardwareselection,stwaredevelopment,andprototype manufacturing,experimental results show that the robot achieved a ground movement speed 6.57 m/min and a 75o wall-climbing speed 2.78m/min.Compared to traditional dual-loop PIDcontrol,theproposed method reduces the maximum errorby 24.7% : Theseresultsvalidatethedesign'sefectiveness,practicality,androbustness,demonstratingitsabilitytomeetdiversetask requirements.
Keywords:multi-rotor flight;wall climbing;mathematical model; sliding mode control;adaptive control
0 引言
多旋翼爬壁机器人是一种具有独特设计理念的创新型机器人,同时具备传统爬壁机器人和无人机的任务执行能力[1]。(剩余10082字)
