基于STM32单片机的智能避障系统的设计

打开文本图片集
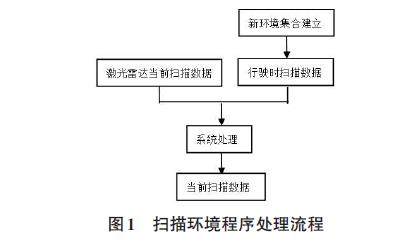
摘要:系统基于STM32单片机主控芯片,采用模糊控制理论对扫描距离进行模糊化处理,将对应隶属函数输出到测速电机,应用激光雷达传感器建立环境的扫描模块,利用角度计算公式将扫描数据传给底层盘,底层盘附加树莓派,以此提高避障控制系统后期导航地图构建及无线数据传输控制的处理能力。实验运行基于本方案的智能避障控制系统,环境的建立及自主避障导航能力都能达到要求,在行驶过程中,明显优于传统避障方案的路径规划处理,证明本方案设计的基于模糊控制理论的避障算法模型是可行的,能满足实际智能避障应用系统的需求。(剩余3419字)
