改进关联策略的三维多目标跟踪算法

打开文本图片集
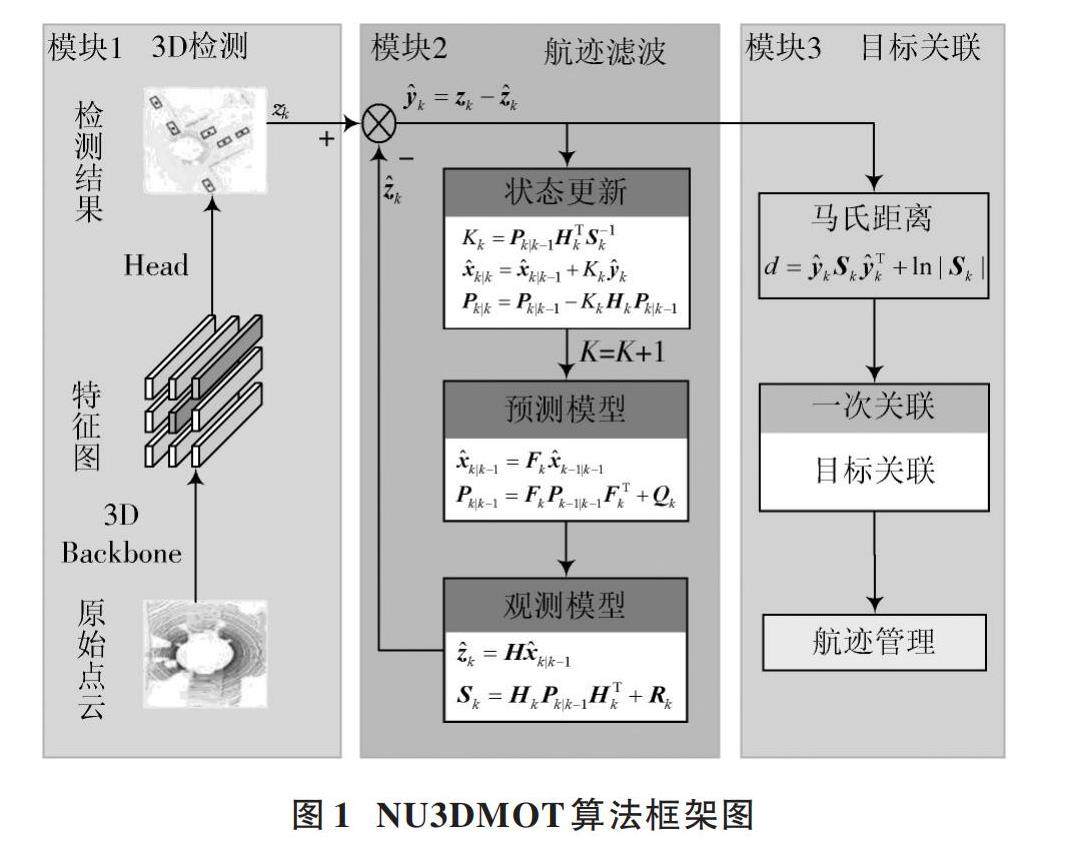
摘 要: 为提高基于激光雷达的三维多目标跟踪准确度,提出一种基于检测的3D多目标跟踪算法。使用深度神经网络从激光点云中获取目标的位置信息后,对目标跟踪算法中的关联策略进行了优化。首先,估计出目标的速度信息,与位置信息一同纳入观测值,在BEV视角下使用卡尔曼滤波器对目标的状态进行预测与更新;然后,基于目标与激光雷达的距离来评估目标位置的不确定度,用于修正观测模型中的协方差矩阵;最后,在马氏距离中添加对目标测量的不确定性加权项,使用匈牙利算法进行数据关联。(剩余9961字)
