无线局域网多机器人系统轮询MAC协议研究

打开文本图片集
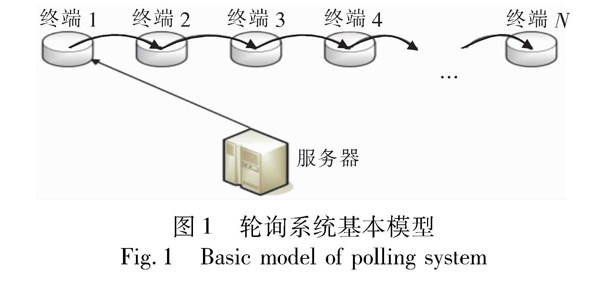
摘要:多机器人系统是一个结构复杂的团体,为了实现机器人之间的高效合作,必须解决机器人之间的信息交互问题,提出将无线局域网的多机器人系统与轮询系统结合的MAC(multiple access control)协议。首先,研究MAC协议中PCF(point coordination function)访问机制,建立轮询系统模型,将该模型应用于多机器人集中式体系架构中,并对其数据传输方式进行分析;推导了门限、完全、限定K=1机器人系统信息传输的平均排队队长、时延、轮询周期的表达式;最后通过MATLAB及ROS系统对三种系统的理论值和仿真值进行分析比较。(剩余15026字)
