基于G-A*的ABB机器人轨迹优化

打开文本图片集
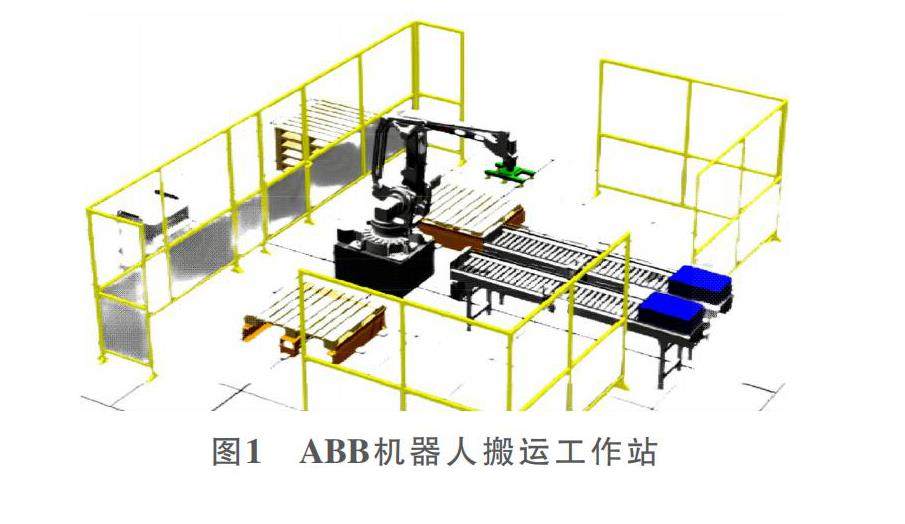
【摘 要】ABB机器人在汽车零部件搬运和汽车组装领域的应用,使得汽车的生产效率得到了很大提升。随着汽车零部件的搬运速度和组装节拍的增加,对ABB机器人的性能要求也越来越高,所以优化ABB机器人的运动轨迹是提高作业效率和装配节拍的关键。本文基于RobotStudio6.08构建机器人模拟工作站,通过对已有的机器人运动模型进行分析,生成机器人工作过程中的轨迹分布,并利用G-A*算法,对多个目标点之间的轨迹进行平滑处理,从而获得最优轨迹。(剩余6479字)
