基于ESP32-CAM的四旋翼无人机设计简析

打开文本图片集
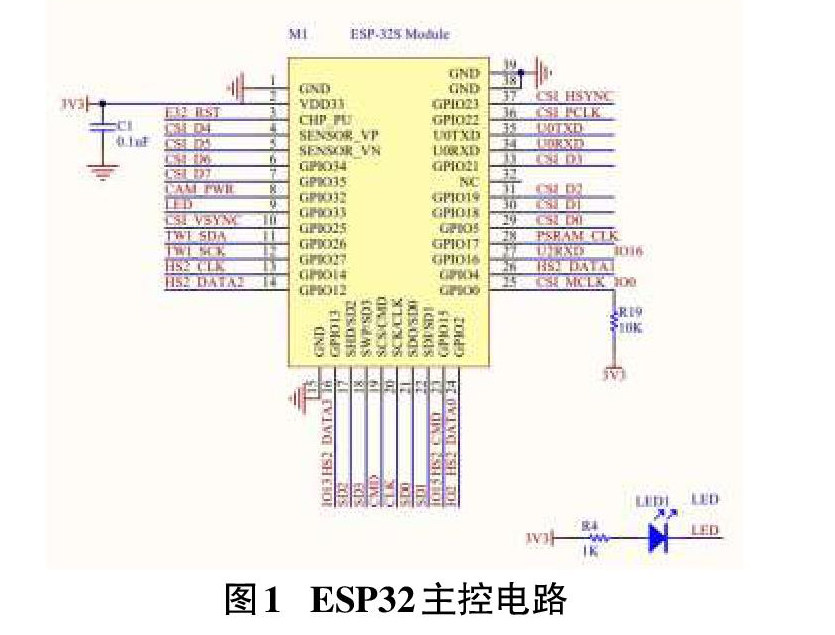
摘要:该系统基于Esp32控制器,使用4个820空心杯电机,制作小型四旋翼无人机,能实现空中自平衡,红外自避障,并简要介绍了四旋翼无人机在6个自由度上的控制方法及原理。
关键词:四旋翼无人机;嵌入式应用;ESP32
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2022)27-0086-03
开放科学(资源服务)标识码(OSID):
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。(剩余4141字)
