注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
中图分类号:TH39 DOI:10.16578/j.issn.1004.2539.2025.06.002
0 引言
足式机器人依靠离散的落足点行进,对野外复杂地形环境具有很强的适应性,在山地运输、勘探、搜救,乃至遂行军事作战等领域都具有巨大的应用潜力[]。当前,足式机器人的发展重点在于提高机器人的移动速度和机动性,由此对关节运动跟踪精度和响应速度提出了高要求[2。(剩余15386字)
登录龙源期刊网
购买文章
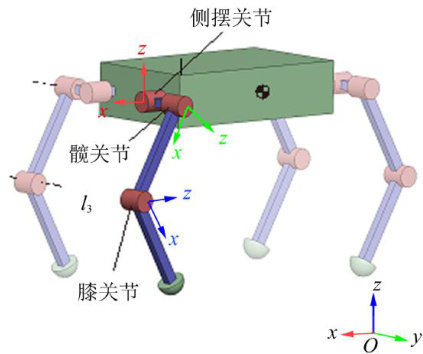
考虑关节摩擦特性的足式机器人单腿模型动态参数辨识及控制
文章价格:6.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00