注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
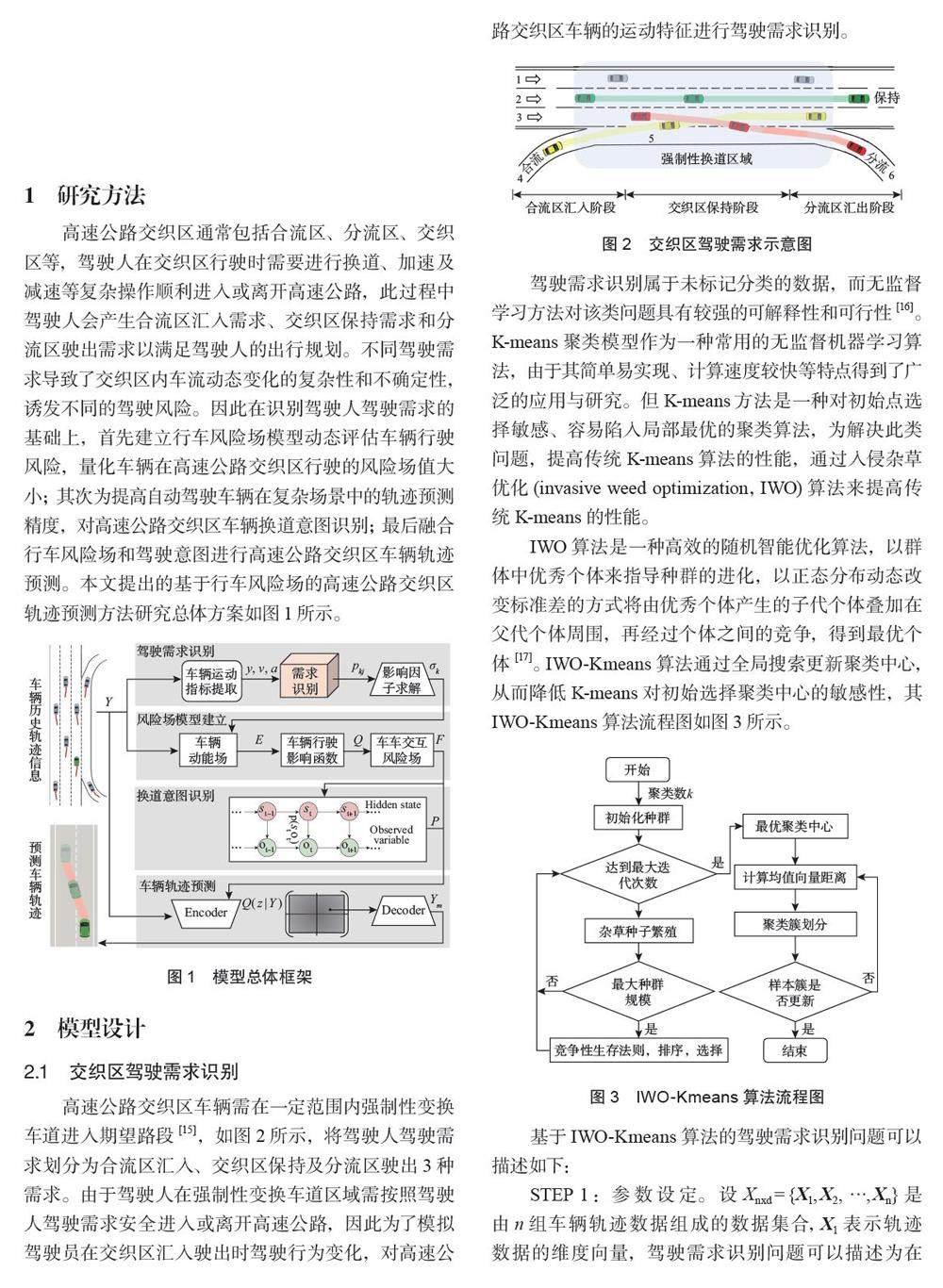
摘 要:为提高交织区车辆轨迹预测精度,该文提出了一种融合行车风险场和车辆换道意图的车辆轨迹预测方法。分析交织区驾驶人驾驶需求变化,利用行车风险场模型统一表示车辆行驶时的交互风险;采用隐Markov模型识别车辆换道意图;通过深度置信网络在线学习机(DBN_OSELM)模型对输入特征进行多维度扩展和融合,提高交织区轨迹预测的准确率;最后,基于CitySim 数据集对所提方法进行评估。(剩余2173字)
登录龙源期刊网
购买文章
基于行车风险场的高速公路交织区车辆轨迹预测方法
文章价格:3.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00