基于动态输出反馈的汽车横摆与侧倾稳定性控制

打开文本图片集
关键词:电动汽车;动态输出反馈;鲁棒控制;横摆稳定性;侧倾稳定性中图分类号:U461;TP273DOI:10.3969/j.issn.1004-132X.2025.07.007 开放科学(资源服务)标识码(OSID):
Vehicle Yaw and Roll Stability Control Based on Dynamic Output Feedback
YIN Xizhi1,2.3HU Sanbao1,2,3FENG Zhiyong1,2,3 *
1.Hubei Key Laboratory of Advanced Technology of Automotive Components,Wuhan University of Technology,Wuhan,430070 2.Auto Components Technology Hubei Collaborative Innovation Center,Wuhan University of Technology,Wuhan,430070
3.Hubei Technology Research Center of New Energy and Intelligent Connected Vehicle Engineering, Wuhan,430070
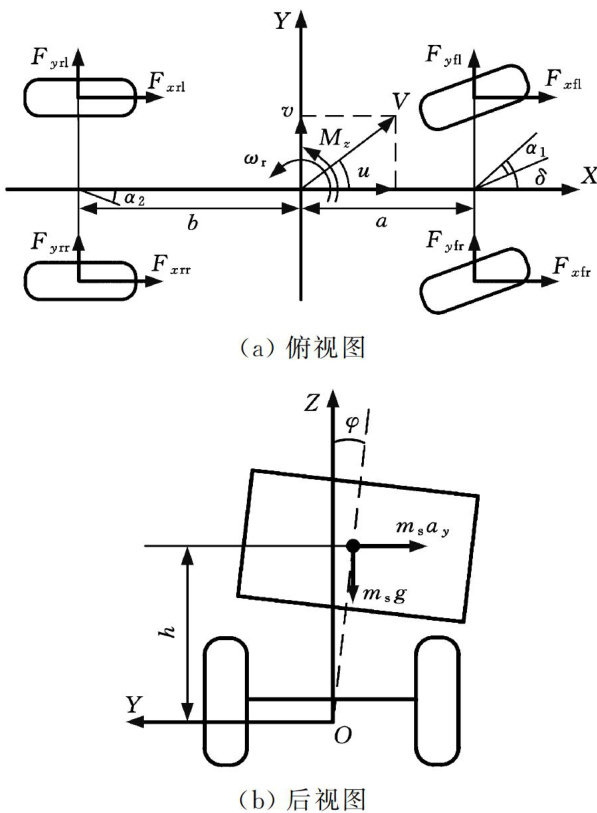
Abstract: In order to improve the yaw and roll stability of in-wheel motor drive electric vehicles under extreme conditions such as high speed and low adhesion,a 3-DOF multi-cell model of vehicle lateral dynamics was established,and a robust layered controller was proposed. The local optimal solution of the upper-level reduced-order dynamic output feedback controller was obtained by iterative search,with the demands for the pole configuration and H∞ performance constraints at the same time. With the optimization objective of minimizing the comprehensive tire load rate,the optimal torque of the lower four wheels was obtained. Simulink and CarSim co-simulation results show that this control strategy may significantly improve vehicle stability under different working conditions,and maintain robustness to system parameter variations and external disturbances.
Key words: electric vehicle; dynamic output feedback;robust control; yaw stability; roll stability
0 引言
与集中式车辆相比,轮毂电机驱动的电动汽车省去了传动轴等机械连接机构,具有传动链短、结构紧凑、传动效率高、空间布置利用率高等特点,有利于提高车辆的稳定性及经济性[1]。(剩余11437字)
