爬树机器人研究与应用综述

打开文本图片集
中图分类号:S776,TP242 文献标识码:A 文章编号:2095-2953(2025)07-0013-08
Review of Research and Applications of Tree-Climbing Robots
LIN Guo-zhu¹, ZHANG Ri-hong’ *, ZHANG Rui-hua 1 ,TAN Yong-tao 2 (2号 (1.College of Mechanical and Electrical Engineering,Zhongkai University of Agriculture and Engineering, Guangzhou Guangdong 510225,China; 2.Yunfu Jianxing Technology Development Co.,Ltd.,Yunfu Guangdong 527399,China)
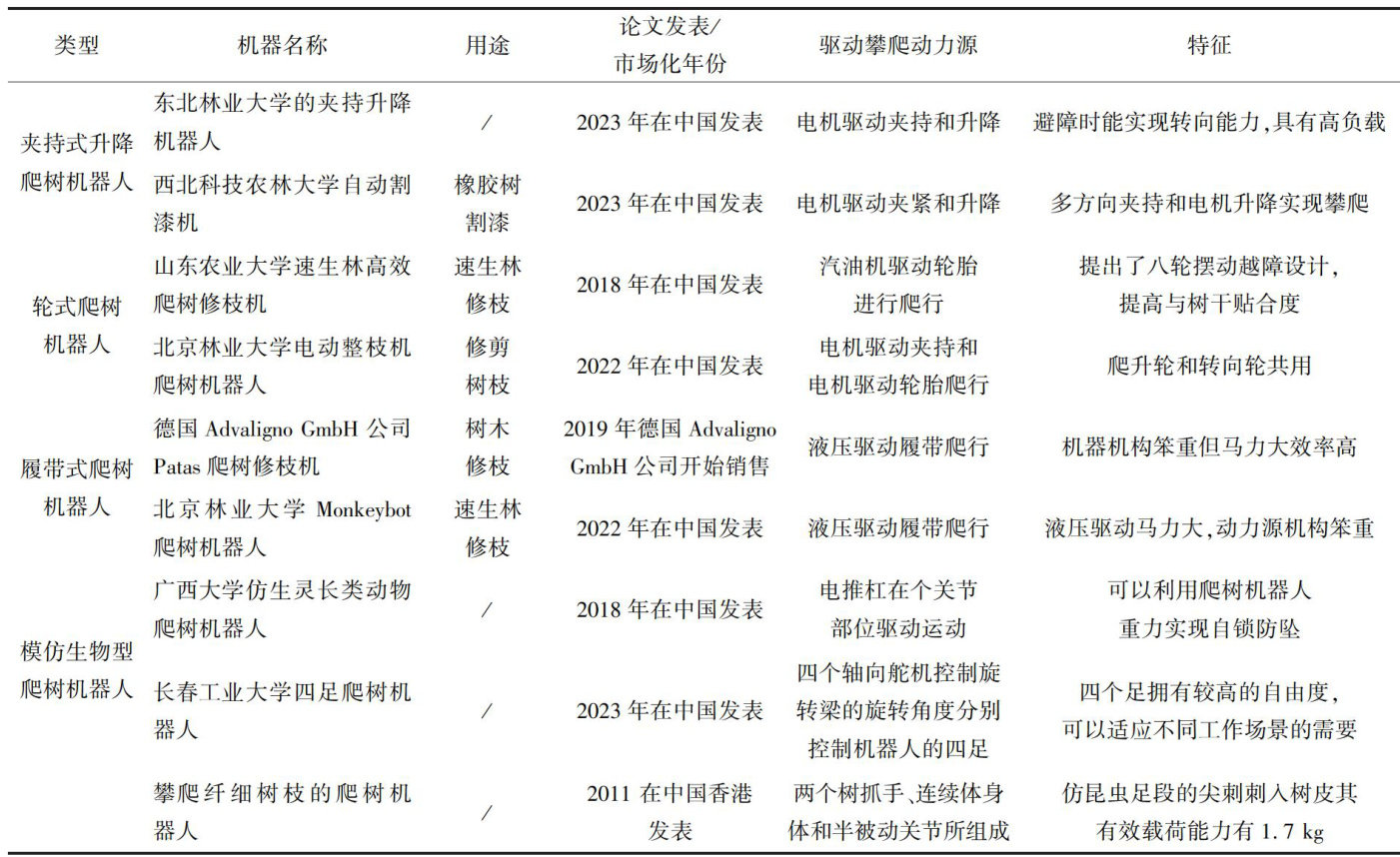
Abstract:As a high-tech product that can replace manual work in the high-altitude environment,the tree-climbing robot has received extensive attention in domesticand foreign working robot research institutions in recent years.In this paper,the technical progress of tree-climbing robots with typical cases at homeand abroad isreviewedfrom he aspects of structural type design,kinematicand dynamic modeling,sensing andcontrol methods,and practical applications.Finally,,the development trend and challnges of tree-climbing robots are summarized.The purpose of this paper is to promote the further developmentof tree-climbing robot technology,improve operation eficiency,reduce manual labor intensityand risk,and providenew tools and means for technological upgrading and scientific research in related industries.
Key words:tree-climbing robot; structure; kinematics;control system;application scenario
在现代科技中,机器人技术越来越广泛地应用于各个领域[1]。(剩余10517字)
