基于CVT和模拟退火的多机器人均匀部署

打开文本图片集
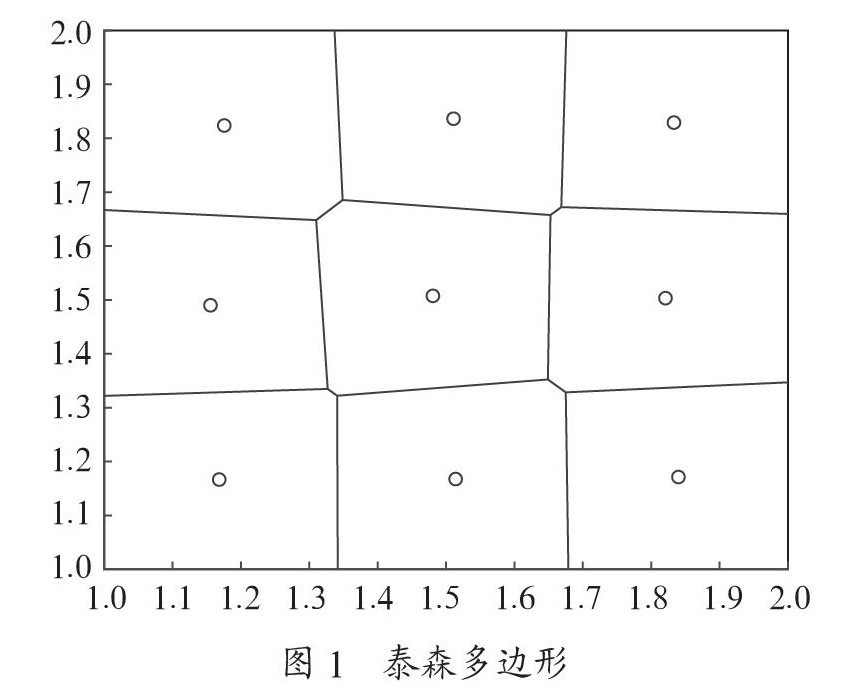
摘 要:相对于单个机器人,多机器人在空间搜索、环境监测、随机环境网络部署上具有很大的优势。该研究针对上述应用中任意环境边界机器人均匀部署问题展开,提出了一种二维空间中任意部署边界的机器人均匀部署方法,该方法首先根据已知的部署边界,使用CVT(Centroidal Voronoi tessellation)对图形进行分割来获取均匀部署目标的位置,然后采用模拟退火算法对随机分布的机器人进行部署分配,通过数值仿真证明了所提方法是有效的。(剩余10888字)
