基于行人轨迹预测的无人车动态避障方法

打开文本图片集
中图分类号:TP242.2 文献标志码:A DOI:10.12305/j.issn.1001-506X.2025.07.29
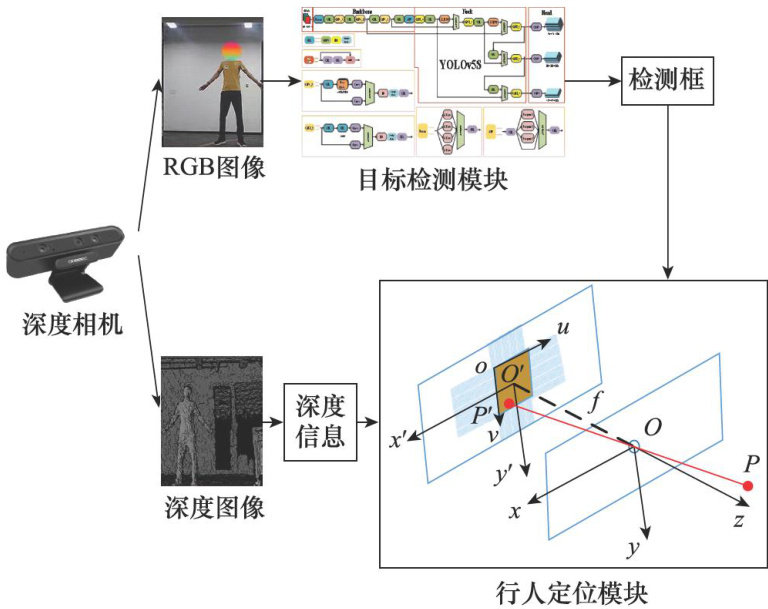
Abstract:A dynamic obstacle avoidance method for unmanned vehicle based on pedestrian trajectory prediction is proposed to address the problem of poor obstacle avoidance performance caused by the lack of consideration of target motion trends during autonomous navigation of unmanned vehicle. Firstly,use depth camera and object detection algorithm to complete pedestrian recognition and position calculation,and obtain temporal information of pedestrian position through tracking. Secondly,bycombining one-dimensional convolutional neural network (CNN) with bidirectional gated recurrent unit (BiGRU)and incorporating attention(ATT) mechanism,a CNN-BiGRU-ATT pedestrian trajectory prediction model is constructed,which predicts future trajectories based on the current position sequence of pedestrians.Finally,the Bresenham algorithm is used to overlay the current position and trajectory prediction results of pedestrians on the cost map, enabling global and local path planning algorithms to avoid collsion risks in advance.Experiments show that the pedestrian detection and localization method based on depth camera can accurately calculate the historical trajectory of pedestrian,providing reliable input for trajectory prediction model. The pedestrian trajectory prediction model based on CNN-BiGRU-ATT has smaller prediction errors in various motion states. The cost map integrated with trajectory prediction results improves the foresight of path planning,avoids frequent :hanges of global and local paths by unmanned vehicle,and improves the eficiency of task execution. Keywords: autonomous navigation; trajectory prediction; cost map; dynamic obstacle avoidance
0 引言
随着智能化和无人化技术的发展,以无人机、无人车为代表的无人驾驶系统在工业、农业、军事、交通运输等领域得到了广泛的应用,其中无人机的自主导航技术相对比较成熟,然而由于地面环境相对空中更加复杂,无人车自主导航时面临更多未知和突发因素[2],因此无人车自主导航大规模应用还存在诸多挑战。(剩余16637字)
