注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
中图分类号:TP242 DOI:10.16578/j.issn.1004.2539.2025.11.007
0 引言
随着智能机械臂在航天、工业制造、医疗、水下作业等行业被广泛应用,机械臂已成为许多领域的研究热点,而机械臂的路径规划[-5作为机械臂相关研究中的重要内容,一直备受关注和研究。目前,机械臂的路径规划主要可以分为两类:基于完全已知环境的全局轨迹规划和基于传感器感应未知空间环境的局部轨迹规划。(剩余8987字)
登录龙源期刊网
购买文章
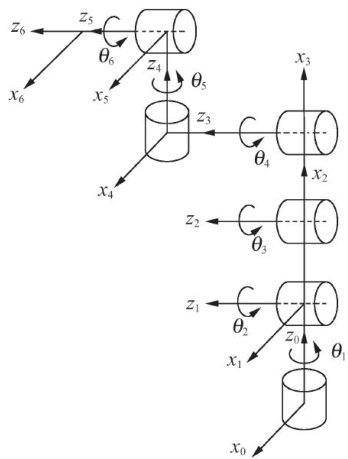
基于无碰撞通道的启发式RRT机械臂路径规划算法
文章价格:5.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00