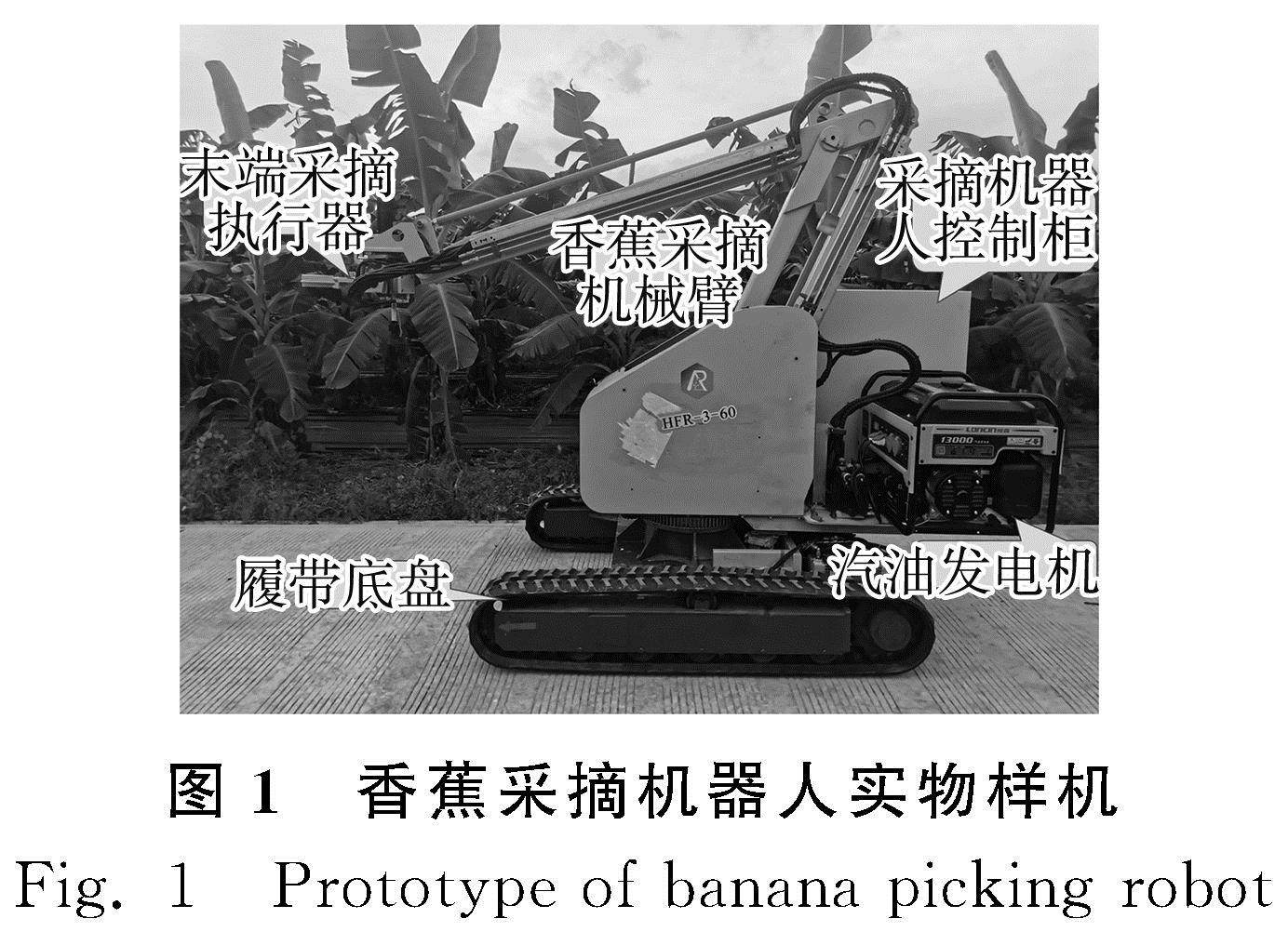
基于牛顿迭代法的香蕉采摘机器人逆运动学求解研究

打开文本图片集
摘要:香蕉采摘机器人要在各采样时刻根据果柄夹持机构的目标位置和姿态求得4个自由度的逆运动学解,其底座转角和末端转角可根据几何关系求得解析解,但水平位移和垂直位移因相互耦合呈非线性关系,难以通过解析法求得逆运动学解,故提出一种基于牛顿迭代法的香蕉采摘机器人逆运动学数值求解方法。首先根据采摘机器人的机械结构和几何关系,建立由4个自由度表示果柄夹持机构位置和姿态的正运动学模型,再据此构造水平位移和垂直位移2个自由度满足的方程组,并求出其雅可比矩阵的逆矩阵,然后利用牛顿迭代算法根据果柄夹持机构的目标位置和姿态求得水平位移和垂直位移的逆运动学解。(剩余18178字)
