高空线缆下悬式足轮侧向越障机器人平台设计

打开文本图片集
中图分类号:TH122;TP242 文献标识码:A 文章编号:2095-2953(2025)03-0039-09
Design of Lateral Obstacle-Crossing Robot Platform with Foot Wheels under Suspension of Aerial Cables
ZHANG Jian, ZHAO Zi-wei * , LIU Jia-peng(CollgeofElectromechanicalEngineering,NortheastForestryUniversity,HarbinHeilongjiang15O40,China)
Abstract:Regular inspection of aerial cables is a high-frequency routine work ofthe power system,in recent years, using intellgent inspection systems to replace manual inspection equipment has become a research hotspot,but due to the various fixing ways of aerial cables,resulting in the cable inspection operations facing a variety of obstacles, especially when the cable is fixed laterally withlowersupport,making it more difficult tocrossthebarriers.A passableunder ⋅- suspended foot-wheel lateral obstacle-crossng robotic platform is proposed,which is capable of overcome multiple obstacle situations such as traditional cable-mounted obstaclesand under-supported lateral fixation obstacles.The3Dmodel of therobot platform is builtby Soildworks software,the steps of crossing obstacles areelaborated,the abilityof this robot platform to cross lateral obstaclesand the magnitudeof therequired driving torque are analyzed,andthe required driving torque is simulatedandanalyzed by Soildworks motion.Theresults show thatthe designoffoot wheelscan adapt todiferent sizes ofcables,andtheobstacle-crosing mechanism and lateralauxiliary supportmechanism work in synergy to cross a variety of obstacles,which provides ideas for thesubsequentresearch of related robots.
Key words:aerial robot; power inspection work ; under-suspended foot wheel obstacle crossing
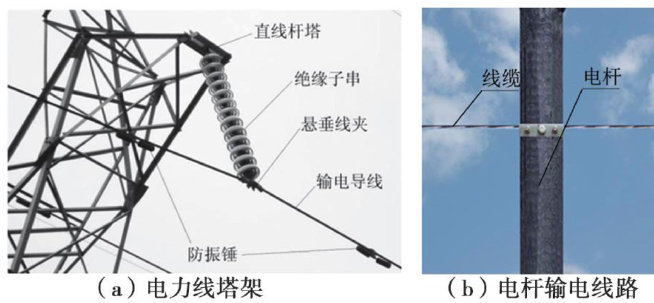
为了减少电力建设安全事故的发生以及增加电力设备的使用寿命,线缆定期巡检作业成为电力系统维护的常态化方法[1-2]。(剩余9803字)
