基于ROS的六轴工业机器人避障研究

打开文本图片集
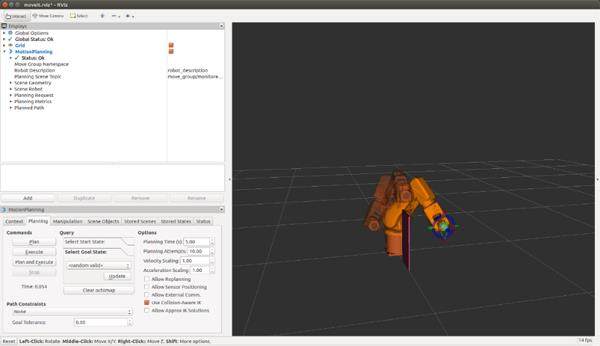
摘要:为了解决工业机器人在复杂环境中的实时避障问题,该文提出在ROS平台中的工业机器人避障规划方案。首先,利用SolidWorks建立机器人3D模型并导入到ROS平台中的RViz环境中;其次,通过MoveIt!工具提供的KDL库完成对机器人的逆运动学方程求解问题,使用OMPL库中的RRT算法实现对机器人的运动规划;最后,在ROS平台下的RViz环境中对运动规划结果进行了仿真,使用rqt工具分析了机器人运动过程中关节位置随时间变化的曲线,验证了该方案的有效性。(剩余5206字)
