基于改进LO算法求解无人机山地三维路径规划

打开文本图片集
关键词:无人机;路径规划;改进狐猴优化算法;Levy飞行步长;地形绘制;最优路径图分类号:TN820.4-34;TP301.6;TP391.9 文献标识码:A 文章编号:1004-373X(2026)09-0191-08
Improved lemur optimisation algorithm for solving UAV 3D path planning in mountainous areas
ChengQing,Hu Haoxuan,Hu Wenhai (CollegeofAirTraffcManagement,CivilAviationFlightUniversityofChina,Deyang6183O7,China)
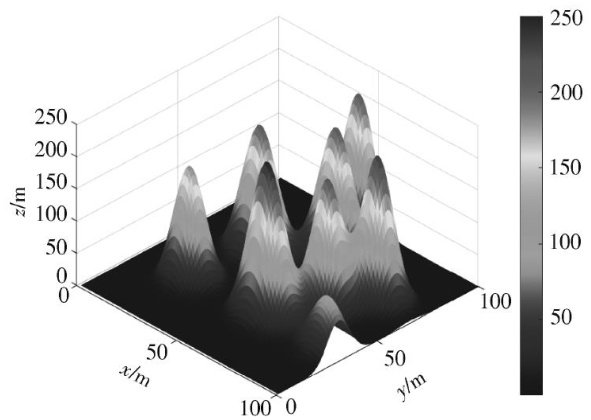
Abstract:Thetraditionalheuristic methodsare slow,havelowaccuracyandarediffcult toprovidecolision-freepaths quicklyincomplex3Denvironments,soanimproved lemuroptimization(ILO)algorithmisproposed.Thisalgorithmintegrates the advantages of the crayfish optimization algorithm (COA). The parameter C inthe COA is adaptively decreased nonlinearly, andtheLevyflightstepsizeisincorporatedintotheCOA.ThejumprateoftheoriginalLOalgorithmisupdatedsmoothlybythe Sigmoidfunction.AGausian functionmodelisuilizedtosimulatethemountainenvironment.Theobjectivefunctionestablishes amathematicalmodelofunmannedaerialvehicle(UAV)flightbasedontheconstraintconditions.Thefitnessfunctionisusedto determinetheminimumcostofflight thatcanavoidobstacleswithinaspecifiedairspace,andcubicsplineinterpolationis employedtosmoth theflightpath.Performancetestsof theILOalgorithmwere conductedonthetestsetCEC2017.The comparativeresultsof multi-algorithm UAVpath planning experimentsshowthattheILOalgorithmgenerates high-qualityand smooth pathsinlessiterations,overcomestheprematureconvergenceandinsuficientlocalsearchabilityofthetraditional geneticalgorithms,adaptstocomplexterrain,andhasreliableperformance,soitprovidesaneficientsolutionforsolving the UAV 3D path planning.
Keywords:UAV;path planning; ILO algorithm; Levy flight step size; terrain plotting;optimal path
0 引言
近年来,无人机凭借灵活的机动性在高空作业和山火监测等领域展现出巨大潜力[14]。(剩余10147字)